camera_init.h File Reference
#include <stdint.h>
Include dependency graph for camera_init.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| uint8_t | CAM_change_baudrate (uint32_t bitrate) |
| Changes the baudrate of the camera by sending it a UART command, and then changing the baudrate of the camera UART port. | |
| uint8_t | CAM_setup () |
| Set up the camera by powering on and changing the baudrate to 230400. | |
| uint8_t | CAM_test () |
| Send the 't' test command to the camera, and check if the response is valid. | |
Function Documentation
◆ CAM_change_baudrate()
| uint8_t CAM_change_baudrate | ( | uint32_t | new_baud_rate | ) |
Changes the baudrate of the camera by sending it a UART command, and then changing the baudrate of the camera UART port.
- Parameters
-
new_baud_rate The new baud rate to set the camera to. Ranges from 1200 to 921600.
- Returns
- 0 if successful, 1 if an invalid baud rate was provided, >=2 if an error occurred
- Note
- This function does not validate that the camera is connected or powered on.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ CAM_setup()
| uint8_t CAM_setup | ( | ) |
Set up the camera by powering on and changing the baudrate to 230400.
- Returns
- 0 on success. The error code from the CAM_change_baudrate function, or >100 if an EPS error occurred.
- Note
- Does not perform a self-test.
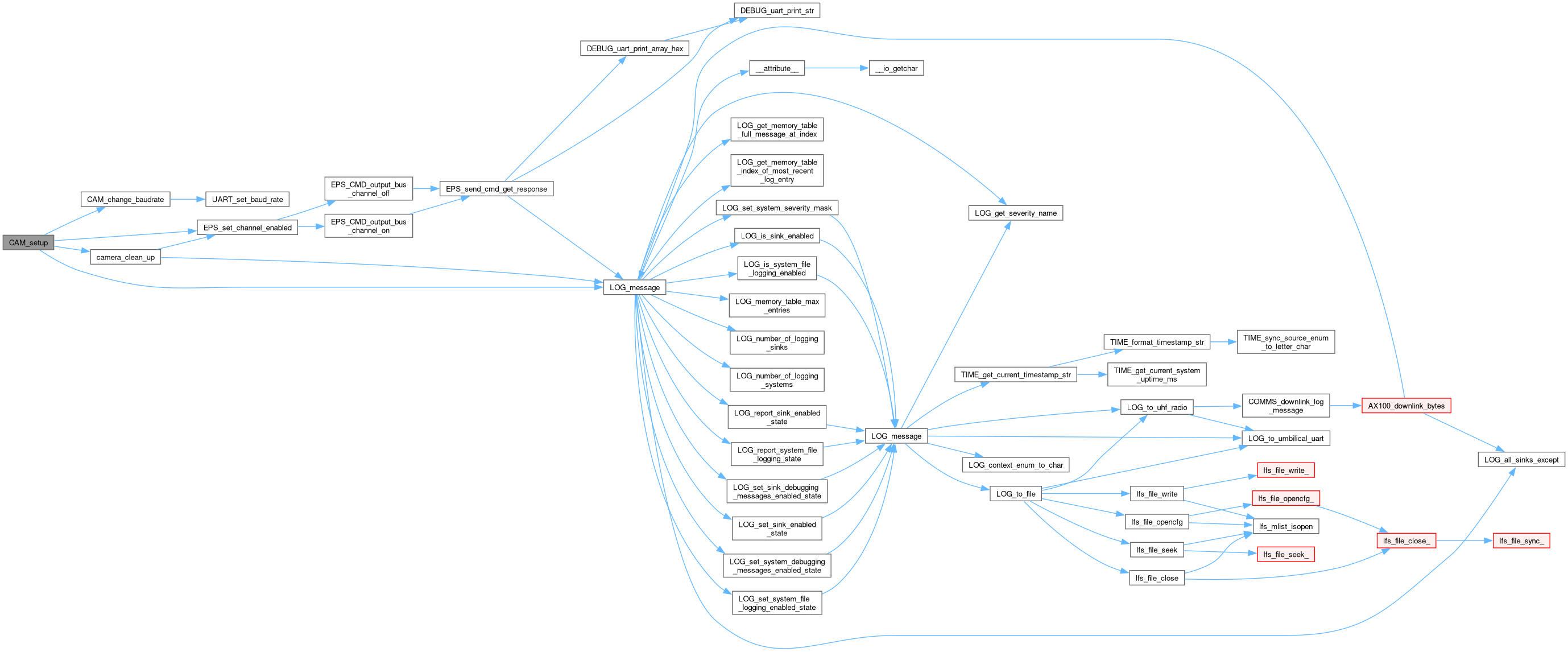
Here is the call graph for this function:
Here is the caller graph for this function:

◆ CAM_test()
| uint8_t CAM_test | ( | ) |
Send the 't' test command to the camera, and check if the response is valid.
- Returns
- 0 if successful, >0 if an error occurred.
- Note
- You should call CAM_setup before calling this function.
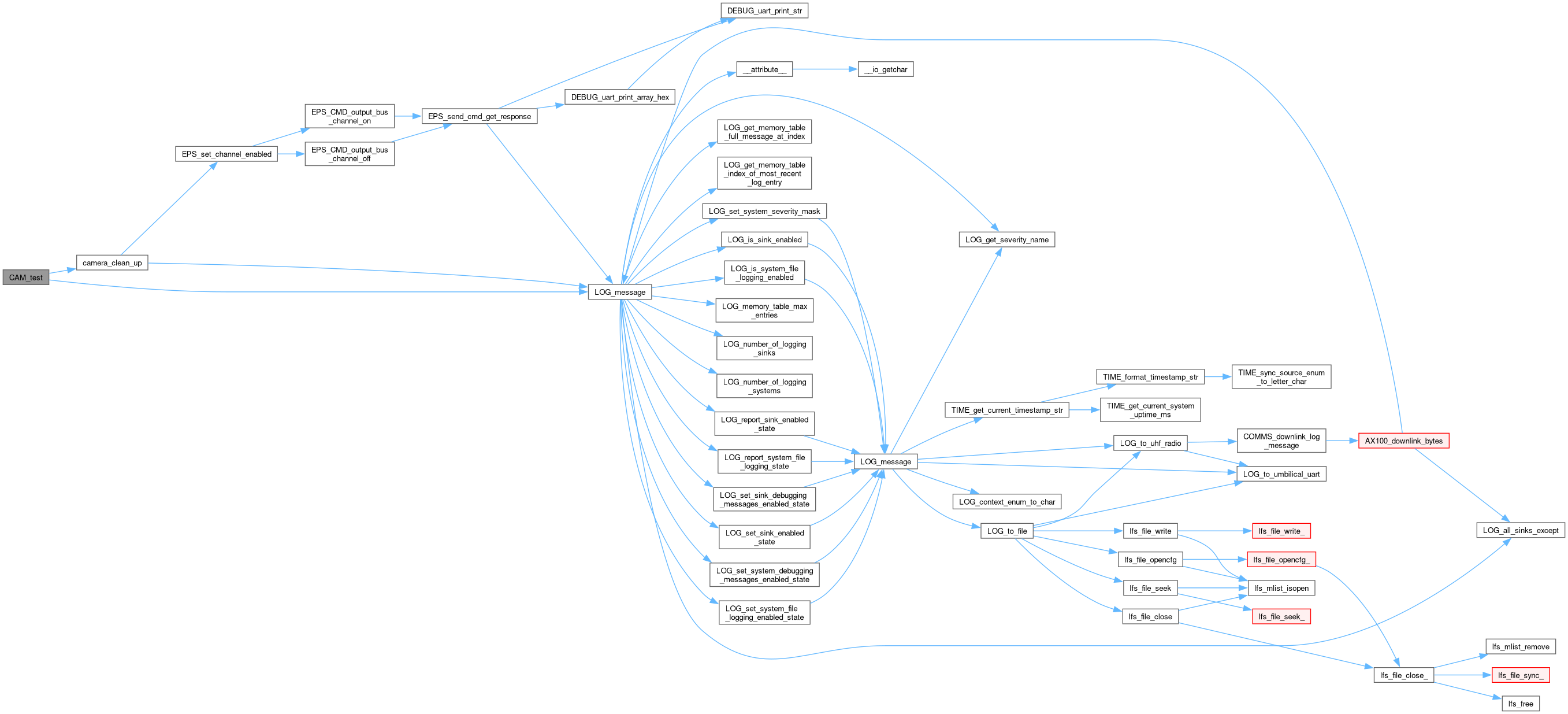
Here is the call graph for this function:
Here is the caller graph for this function:

Generated by