Include dependency graph for telecommand_adcs.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | ABORT_CMD_FOR_FAILED_EXTRACT(x) |
| #define | CHECK_ADCS_COMMAND_SUCCESS(x) |
Functions | |
| uint8_t | TCMDEXEC_adcs_reset (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_identification (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_program_status (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
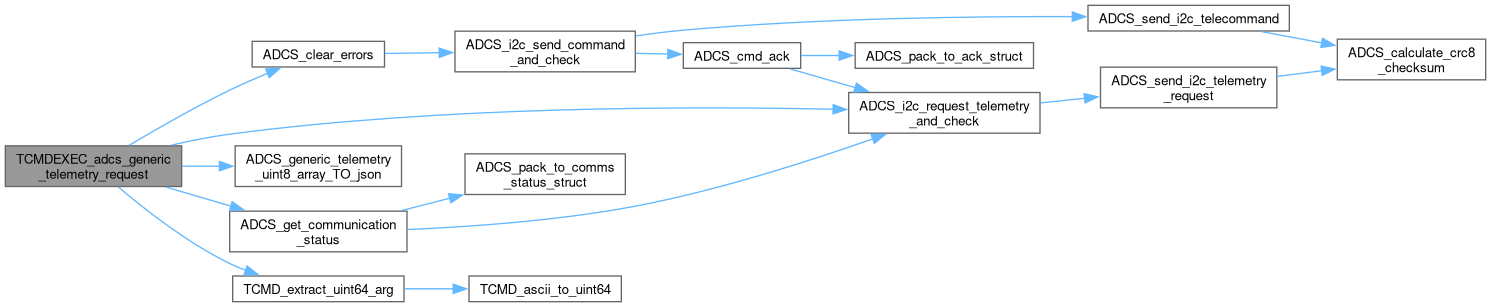
| uint8_t | TCMDEXEC_adcs_communication_status (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_deploy_magnetometer (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_run_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_clear_errors (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_attitude_control_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the attitude control mode of the ADCS; needs Power Control to be set before working. | |
| uint8_t | TCMDEXEC_adcs_attitude_estimation_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_ack (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_run_once (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: If ADCS run mode is Triggered, run the ADCS sensor loop. | |
| uint8_t | TCMDEXEC_adcs_set_magnetometer_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the magnetometer mode of the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_magnetorquer_output (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the magnetorquer output values. | |
| uint8_t | TCMDEXEC_adcs_set_wheel_speed (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the wheel speed of the ADCS. | |
| uint8_t | TCMDEXEC_adcs_save_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_estimate_angular_rates (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_llh_position (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_power_control (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_power_control (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the power control mode of each component of the ADCS; for each, 0 turns the component off, 1 turns it on, and 2 keeps it the same as previously. | |
| uint8_t | TCMDEXEC_adcs_enter_low_power_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Put the ADCS in low-power mode, with only essential component power. | |
| uint8_t | TCMDEXEC_adcs_track_sun (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Automatically track the sun with the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_magnetometer_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_bootloader_clear_errors (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_unix_time_save_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Choose the circumstances to save the current Unix time. | |
| uint8_t | TCMDEXEC_adcs_get_unix_time_save_mode (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_sgp4_orbit_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the ADCS Simplified General Perturbations (SGP4) orbit parameters. | |
| uint8_t | TCMDEXEC_adcs_get_sgp4_orbit_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_save_orbit_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_rate_sensor_rates (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_wheel_speed (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_magnetorquer_command (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_raw_magnetometer_values (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the raw magnetometer values from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_fine_angular_rates (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| uint8_t | TCMDEXEC_adcs_estimate_fine_angular_rates (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_magnetometer_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_commanded_attitude_angles (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_commanded_attitude_angles (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_estimation_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_estimation_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_augmented_sgp4_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_augmented_sgp4_params (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_tracking_controller_target_reference (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the ADCS tracking controller target reference (location on Earth to point towards). | |
| uint8_t | TCMDEXEC_adcs_get_tracking_controller_target_reference (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_set_rate_gyro_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_rate_gyro_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_estimated_attitude_angles (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_magnetic_field_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_fine_sun_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_nadir_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_commanded_wheel_speed (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_igrf_magnetic_field_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_quaternion_error_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_estimated_gyro_bias (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_estimation_innovation_vector (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_raw_cam1_sensor (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_raw_cam2_sensor (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_raw_coarse_sun_sensor_1_to_6 (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_raw_coarse_sun_sensor_7_to_10 (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_cubecontrol_current (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_measurements (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_generic_command (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: execute a generic command on the ADCS. | |
| uint8_t | TCMDEXEC_adcs_generic_bootloader_command (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: execute a generic command on the ADCS bootloader. | |
| uint8_t | TCMDEXEC_adcs_generic_telemetry_request (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: obtain generic telemetry from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_download_sd_file_by_index (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Download a specific file from the ADCS SD card by its index. | |
| uint8_t | TCMDEXEC_adcs_download_sd_file_by_checksum (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| uint8_t | TCMDEXEC_adcs_acp_execution_state (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_current_state_1 (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the given telemetry data from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_save_image_to_sd (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Save an image to the ADCS onboard SD card. | |
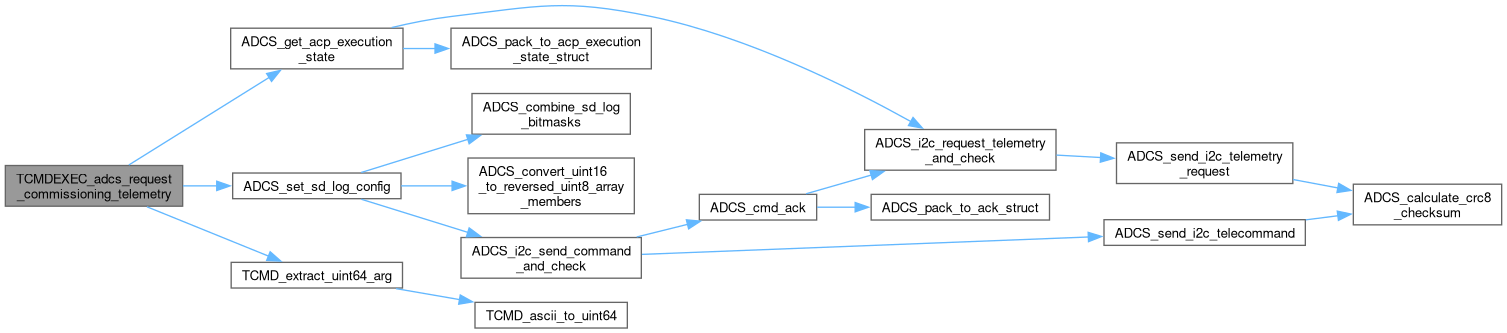
| uint8_t | TCMDEXEC_adcs_request_commissioning_telemetry (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request commissioning telemetry from the ADCS and save it to the onboard SD card. | |
| uint8_t | TCMDEXEC_adcs_synchronize_unix_time (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Synchronize the current ADCS Unix epoch time. | |
| uint8_t | TCMDEXEC_adcs_get_current_unix_time (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Retrieve the current ADCS Unix epoch time. | |
| uint8_t | TCMDEXEC_adcs_set_sd_log_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Repeatedly log given data from an SD card. | |
| uint8_t | TCMDEXEC_adcs_get_sd_log_config (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Retrieve the current ADCS SD log configuration. | |
| uint8_t | TCMDEXEC_adcs_format_sd (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Instruct the ADCS to format the SD card. | |
| uint8_t | TCMDEXEC_adcs_download_index_file (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Get the list of downloadable files from the ADCS SD card as log messages. | |
| uint8_t | TCMDEXEC_adcs_set_commissioning_modes (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Set the run, power control, estimation, and control parameters for a given commissioning step. | |
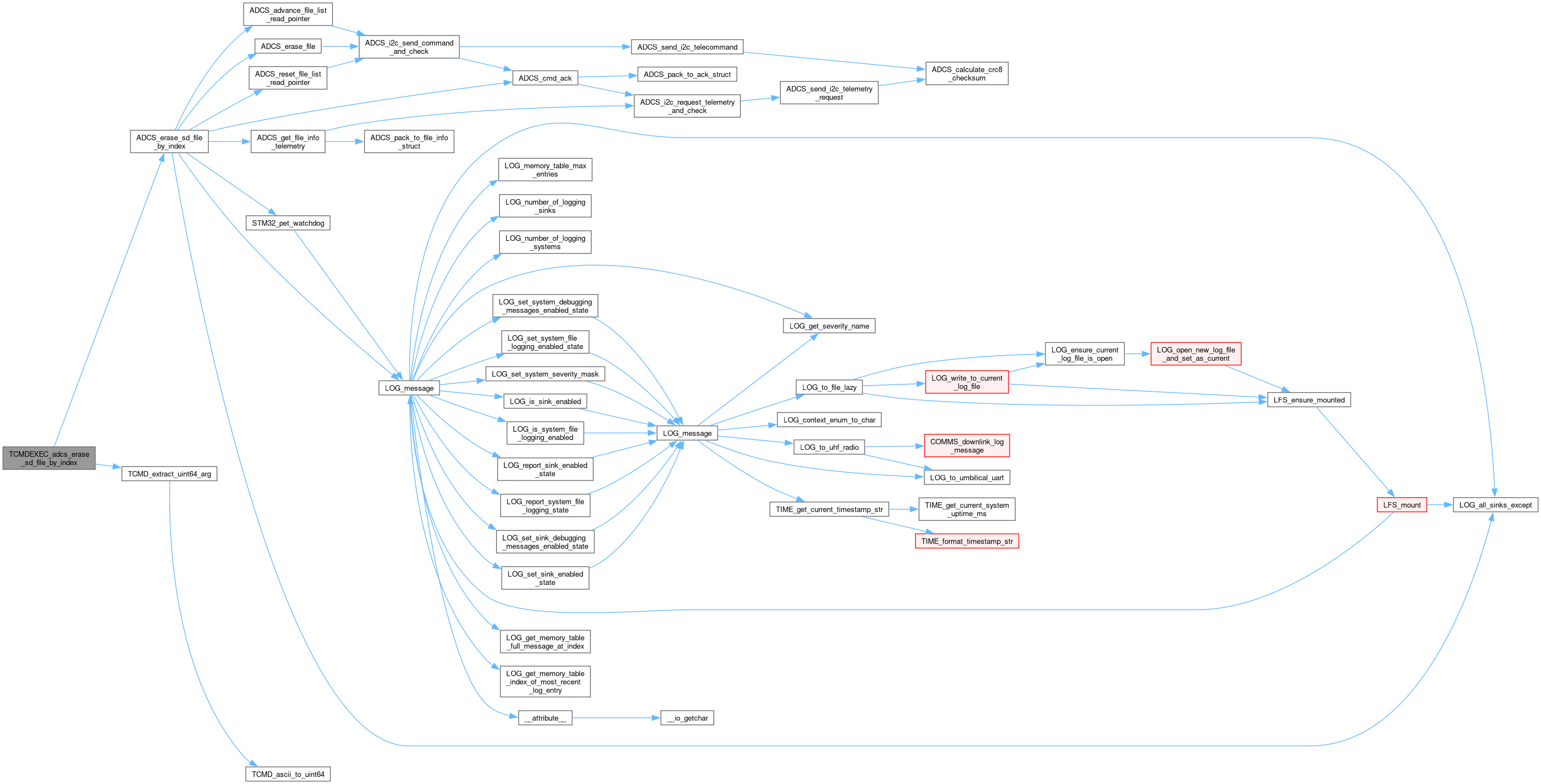
| uint8_t | TCMDEXEC_adcs_erase_sd_file_by_index (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Instruct the ADCS to erase a file from the SD card. | |
| uint8_t | TCMDEXEC_adcs_erase_sd_file_by_checksum (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Instruct the ADCS to erase a file from the SD card. | |
| uint8_t | TCMDEXEC_adcs_exit_bootloader (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: If the ADCS is currently stuck in the bootloader, run the internal flash program (CubeACP) to exit the bootloader. | |
| uint8_t | TCMDEXEC_adcs_convert_to_jpg_by_index (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Instruct the ADCS to convert an SD card file to JPG format. | |
| uint8_t | TCMDEXEC_adcs_convert_to_jpg_by_checksum (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Instruct the ADCS to convert an SD card file to JPG format. | |
| uint8_t | TCMDEXEC_adcs_get_wheel_currents (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the reaction wheel current values from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_cubesense_currents (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the CubeSense current values from the ADCS. | |
| uint8_t | TCMDEXEC_adcs_get_misc_currents (const char *args_str, char *response_output_buf, uint16_t response_output_buf_len) |
| Telecommand: Request the CubeStar (unused) and magnetorquer current values as well as the microcontroller temperature value from the ADCS. | |
Macro Definition Documentation
◆ ABORT_CMD_FOR_FAILED_EXTRACT
| #define ABORT_CMD_FOR_FAILED_EXTRACT | ( | x | ) |
Value:
uint8_t result = x; if (!(result)) { return result; }
◆ CHECK_ADCS_COMMAND_SUCCESS
| #define CHECK_ADCS_COMMAND_SUCCESS | ( | x | ) |
Value:
if ((x)) { return x; }
Function Documentation
◆ TCMDEXEC_adcs_ack()
| uint8_t TCMDEXEC_adcs_ack | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_acp_execution_state()
| uint8_t TCMDEXEC_adcs_acp_execution_state | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_attitude_control_mode()
| uint8_t TCMDEXEC_adcs_attitude_control_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the attitude control mode of the ADCS; needs Power Control to be set before working.
- Parameters
-
args_str - Arg 0: Control mode to set (Table 77 in Firmware Manual)
- Arg 1: Timeout to set control mode
- Returns
- 0 on success, >0 on error
ADCS_control_mode_enum_t ADCS_CONTROL_MODE_NONE = 0, ADCS_CONTROL_MODE_DETUMBLING = 1, ADCS_CONTROL_MODE_Y_THOMSON_SPIN = 2, ADCS_CONTROL_MODE_Y_WHEEL_MOMENTUM_STABILIZED_INITIAL_PITCH_ACQUISITION = 3, ADCS_CONTROL_MODE_Y_WHEEL_MOMENTUM_STABILIZED_STEADY_STATE = 4, ADCS_CONTROL_MODE_XYZ_WHEEL = 5, ADCS_CONTROL_MODE_RWHEEL_SUN_TRACKING = 6, ADCS_CONTROL_MODE_RWHEEL_TARGET_TRACKING = 7, ADCS_CONTROL_MODE_VERY_FAST_SPIN_DETUMBLING = 8, ADCS_CONTROL_MODE_FAST_SPIN_DETUMBLING = 9, ADCS_CONTROL_MODE_USER_SPECIFIC_1 = 10, ADCS_CONTROL_MODE_USER_SPECIFIC_2 = 11, ADCS_CONTROL_MODE_STOP_R_WHEELS = 12, ADCS_CONTROL_MODE_USER_CODED = 13, ADCS_CONTROL_MODE_SUN_TRACKING_YAW_OR_ROLL_ONLY_WHEEL = 14, ADCS_CONTROL_MODE_TARGET_TRACKING_YAW_ONLY_WHEEL = 15
Here is the call graph for this function:

◆ TCMDEXEC_adcs_attitude_estimation_mode()
| uint8_t TCMDEXEC_adcs_attitude_estimation_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: Attitude estimation mode to set (Table 79 in Firmware Manual)
- Returns
- 0 on success, >0 on error
ADCS_estimation_mode_enum_t ADCS_ESTIMATION_MODE_NONE = 0, ADCS_ESTIMATION_MODE_MEMS_RATE_SENSING = 1, ADCS_ESTIMATION_MODE_MAGNETOMETER_RATE_FILTER = 2, ADCS_ESTIMATION_MODE_MAGNETOMETER_RATE_FILTER_WITH_PITCH_ESTIMATION = 3, ADCS_ESTIMATION_MODE_MAGNETOMETER_AND_FINE_SUN_TRIAD_ALGORITHM = 4, ADCS_ESTIMATION_MODE_FULL_STATE_EXTENDED_KALMAN_FILTER = 5, ADCS_ESTIMATION_MODE_MEMS_GYRO_EXTENDED_KALMAN_FILTER = 6, ADCS_ESTIMATION_MODE_USER_CODED_ESTIMATION_MODE = 7
Here is the call graph for this function:

◆ TCMDEXEC_adcs_bootloader_clear_errors()
| uint8_t TCMDEXEC_adcs_bootloader_clear_errors | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_clear_errors()
| uint8_t TCMDEXEC_adcs_clear_errors | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_commanded_wheel_speed()
| uint8_t TCMDEXEC_adcs_commanded_wheel_speed | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_communication_status()
| uint8_t TCMDEXEC_adcs_communication_status | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_convert_to_jpg_by_checksum()
| uint8_t TCMDEXEC_adcs_convert_to_jpg_by_checksum | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Instruct the ADCS to convert an SD card file to JPG format.
- Parameters
-
args_str - Arg 0: The CRC16 checksum of the file as two hex bytes in order (e.g. pass checksum 0x07f1 as "07 f1")
- Arg 1: Quality factor (1 is the most compressed and lossy, 100 is the least)
- Arg 2: White balance
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_convert_to_jpg_by_index()
| uint8_t TCMDEXEC_adcs_convert_to_jpg_by_index | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Instruct the ADCS to convert an SD card file to JPG format.
- Parameters
-
args_str - Arg 0: Index of the file to convert
- Arg 1: Quality factor (1 is the most compressed and lossy, 100 is the least)
- Arg 2: White balance
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_cubecontrol_current()
| uint8_t TCMDEXEC_adcs_cubecontrol_current | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_deploy_magnetometer()
| uint8_t TCMDEXEC_adcs_deploy_magnetometer | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: timeout for deployment [seconds]
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

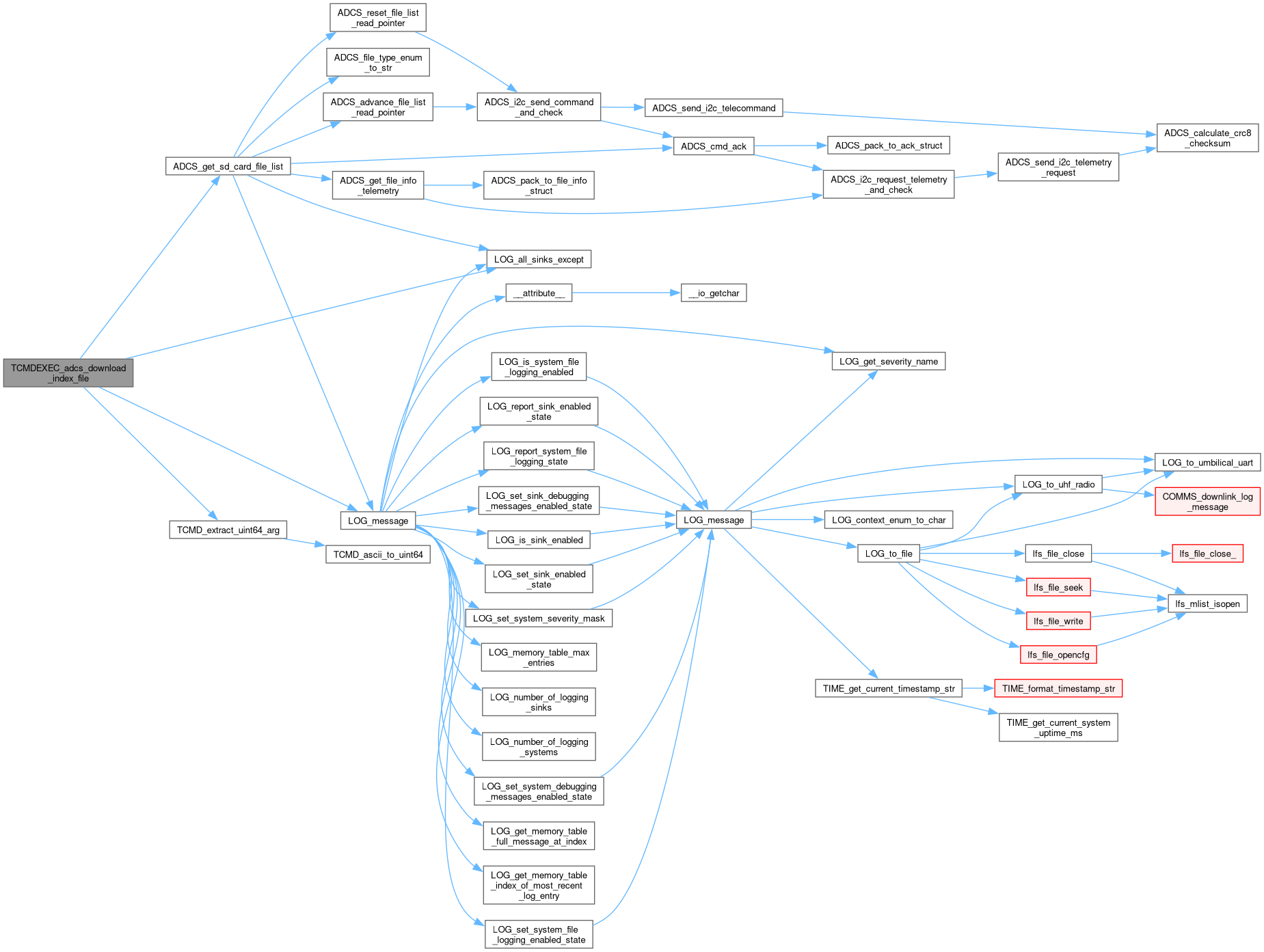
◆ TCMDEXEC_adcs_download_index_file()
| uint8_t TCMDEXEC_adcs_download_index_file | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Get the list of downloadable files from the ADCS SD card as log messages.
- Parameters
-
args_str - Arg 0: Offset: The offset index to start reading (starts at 0).
- Arg 1: Length: The number of files to get (limited to 32). 0 to request the max.
- Returns
- 0 on success, >0 on error
- Note
- Despite its name, this telecommand does not download any files nor write to LittleFS.
Here is the call graph for this function:
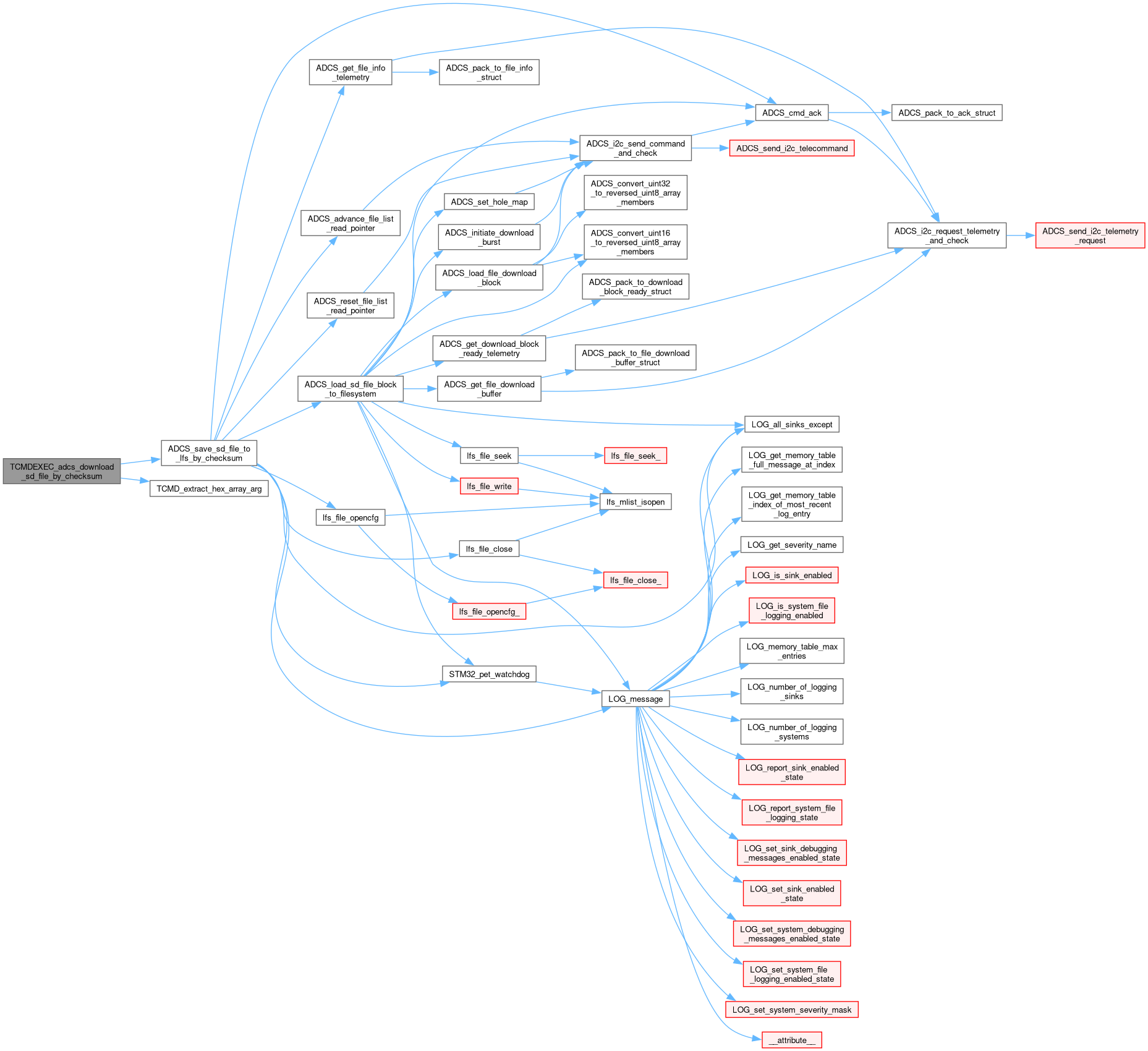
◆ TCMDEXEC_adcs_download_sd_file_by_checksum()
| uint8_t TCMDEXEC_adcs_download_sd_file_by_checksum | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Here is the call graph for this function:
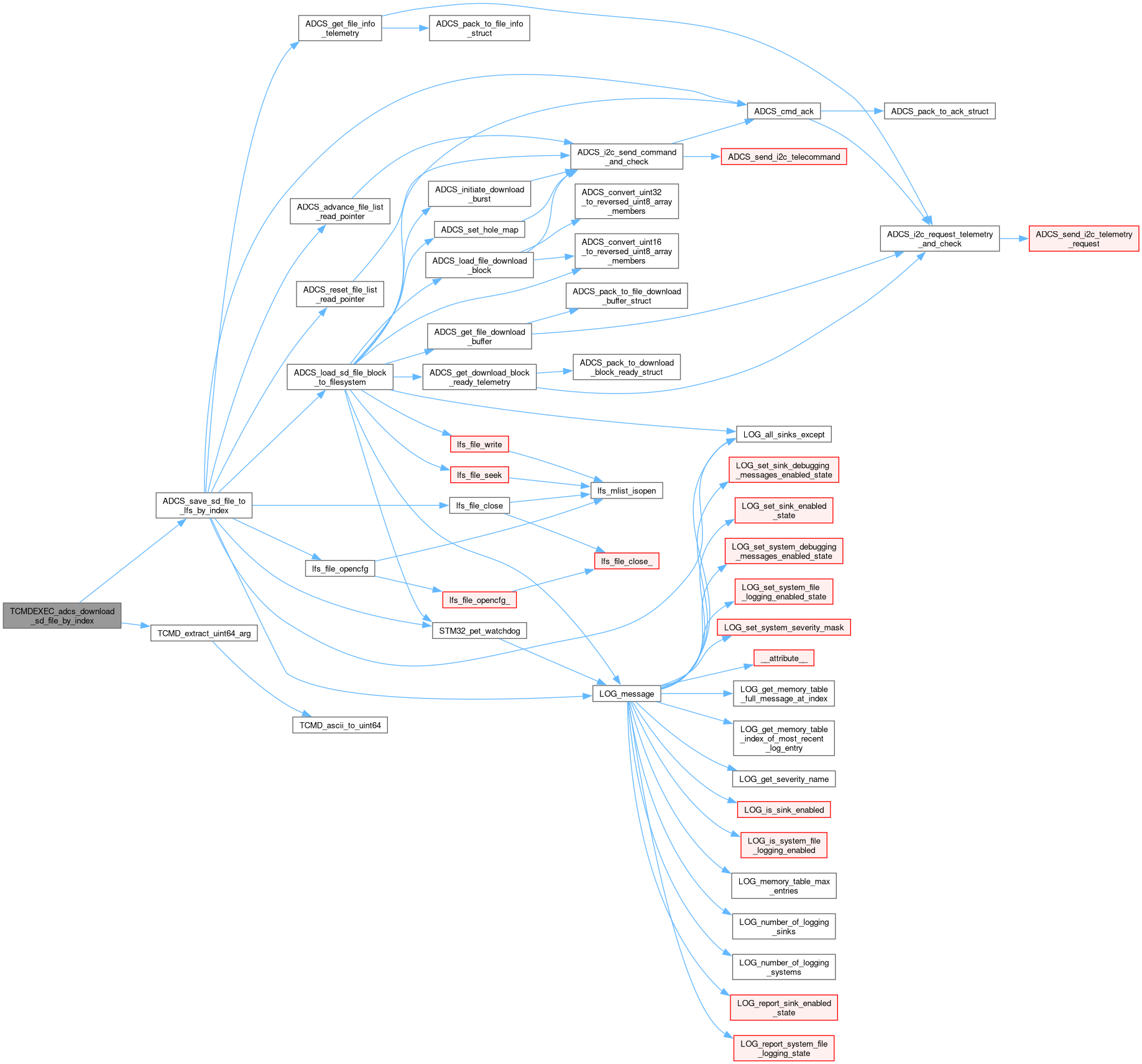
◆ TCMDEXEC_adcs_download_sd_file_by_index()
| uint8_t TCMDEXEC_adcs_download_sd_file_by_index | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Download a specific file from the ADCS SD card by its index.
- Parameters
-
args_str - Arg 0: The index of the file to download
- Returns
- 0 on success, >0 on error
This command writes a file to LittleFS in the /ADCS/ directory, identified by the file's checksum. For example, "ADCS/log_%x.TLM", "ADCS/img_%x.jpg", "ADCS/img_%x.bmp", where x is the file's CRC16 checksum in lowercase hex.
Here is the call graph for this function:
◆ TCMDEXEC_adcs_enter_low_power_mode()
| uint8_t TCMDEXEC_adcs_enter_low_power_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Put the ADCS in low-power mode, with only essential component power.
- Parameters
-
args_str - Arg 0: Enable stable attitude mode. 1 to keep the attitude of the satellite stable (costs average 250 mW, maximum 1 W extra), 0 to disable control entirely (satellite will slowly start to tumble).
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

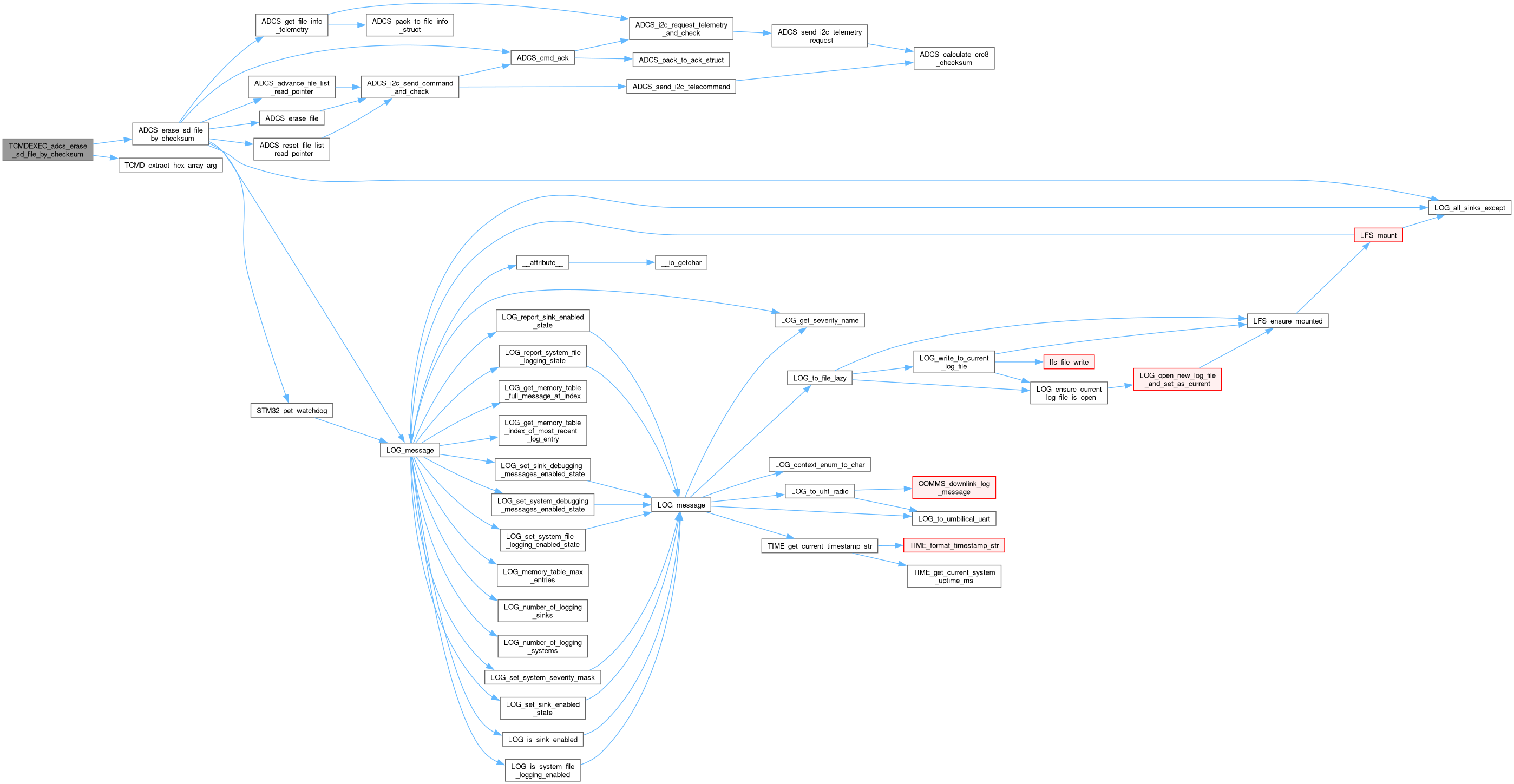
◆ TCMDEXEC_adcs_erase_sd_file_by_checksum()
| uint8_t TCMDEXEC_adcs_erase_sd_file_by_checksum | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Instruct the ADCS to erase a file from the SD card.
- Parameters
-
args_str - Arg 0: CRC16 checksum of the file as two hex bytes in order (e.g. pass checksum 0x07f1 as "07 f1")
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_erase_sd_file_by_index()
| uint8_t TCMDEXEC_adcs_erase_sd_file_by_index | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Instruct the ADCS to erase a file from the SD card.
- Parameters
-
args_str - Arg 0: Index of the file to erase
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_estimate_angular_rates()
| uint8_t TCMDEXEC_adcs_estimate_angular_rates | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_estimate_fine_angular_rates()
| uint8_t TCMDEXEC_adcs_estimate_fine_angular_rates | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_estimated_attitude_angles()
| uint8_t TCMDEXEC_adcs_estimated_attitude_angles | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_estimated_gyro_bias()
| uint8_t TCMDEXEC_adcs_estimated_gyro_bias | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_estimation_innovation_vector()
| uint8_t TCMDEXEC_adcs_estimation_innovation_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_exit_bootloader()
| uint8_t TCMDEXEC_adcs_exit_bootloader | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: If the ADCS is currently stuck in the bootloader, run the internal flash program (CubeACP) to exit the bootloader.
- Note
- This command will do nothing if not in the bootloader
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_fine_angular_rates()
| uint8_t TCMDEXEC_adcs_fine_angular_rates | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
◆ TCMDEXEC_adcs_fine_sun_vector()
| uint8_t TCMDEXEC_adcs_fine_sun_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_format_sd()
| uint8_t TCMDEXEC_adcs_format_sd | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Instruct the ADCS to format the SD card.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_generic_bootloader_command()
| uint8_t TCMDEXEC_adcs_generic_bootloader_command | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: execute a generic command on the ADCS bootloader.
- Parameters
-
args_str - Arg 0: ID of the telecommand to send (see Firmware Reference Manual)
- Arg 1: hex array of data bytes of length up to 504 (longest command is almost ADCS Configuration (ID 26/204) at 504 bytes)
- Note
- All hex bytes must be two-digit (e.g. 00 instead of 0); for zero-parameter commands, use 00
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_generic_command()
| uint8_t TCMDEXEC_adcs_generic_command | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: execute a generic command on the ADCS.
- Parameters
-
args_str - Arg 0: ID of the telecommand to send (see Firmware Reference Manual)
- Arg 1: hex array of data bytes of length up to 504 (longest command is almost ADCS Configuration (ID 26/204) at 504 bytes)
- Note
- All hex bytes must be two-digit (e.g. 00 instead of 0); for zero-parameter commands, use 00
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_generic_telemetry_request()
| uint8_t TCMDEXEC_adcs_generic_telemetry_request | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: obtain generic telemetry from the ADCS.
- Parameters
-
args_str - Arg 0: ID of the telemetry request to send (see Firmware Reference Manual)
- Arg 1: number of data bytes expected to receive from the ADCS (also see Firmware Reference Manual, up to 504)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_get_augmented_sgp4_params()
| uint8_t TCMDEXEC_adcs_get_augmented_sgp4_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_commanded_attitude_angles()
| uint8_t TCMDEXEC_adcs_get_commanded_attitude_angles | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_cubesense_currents()
| uint8_t TCMDEXEC_adcs_get_cubesense_currents | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the CubeSense current values from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_current_state_1()
| uint8_t TCMDEXEC_adcs_get_current_state_1 | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_current_unix_time()
| uint8_t TCMDEXEC_adcs_get_current_unix_time | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Retrieve the current ADCS Unix epoch time.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_estimation_params()
| uint8_t TCMDEXEC_adcs_get_estimation_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_llh_position()
| uint8_t TCMDEXEC_adcs_get_llh_position | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_magnetometer_config()
| uint8_t TCMDEXEC_adcs_get_magnetometer_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_magnetorquer_command()
| uint8_t TCMDEXEC_adcs_get_magnetorquer_command | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_misc_currents()
| uint8_t TCMDEXEC_adcs_get_misc_currents | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the CubeStar (unused) and magnetorquer current values as well as the microcontroller temperature value from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_power_control()
| uint8_t TCMDEXEC_adcs_get_power_control | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_rate_gyro_config()
| uint8_t TCMDEXEC_adcs_get_rate_gyro_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_raw_magnetometer_values()
| uint8_t TCMDEXEC_adcs_get_raw_magnetometer_values | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the raw magnetometer values from the ADCS.
- Note
- Values are given as raw ADC values; use adcs_get_magnetic_field_vector for calibrated values
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_sd_log_config()
| uint8_t TCMDEXEC_adcs_get_sd_log_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Retrieve the current ADCS SD log configuration.
- Parameters
-
args_str - Arg 0: which log to retrieve the configuration for (1 or 2)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_sgp4_orbit_params()
| uint8_t TCMDEXEC_adcs_get_sgp4_orbit_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_tracking_controller_target_reference()
| uint8_t TCMDEXEC_adcs_get_tracking_controller_target_reference | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_unix_time_save_mode()
| uint8_t TCMDEXEC_adcs_get_unix_time_save_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_wheel_currents()
| uint8_t TCMDEXEC_adcs_get_wheel_currents | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the reaction wheel current values from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_get_wheel_speed()
| uint8_t TCMDEXEC_adcs_get_wheel_speed | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_identification()
| uint8_t TCMDEXEC_adcs_identification | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_igrf_magnetic_field_vector()
| uint8_t TCMDEXEC_adcs_igrf_magnetic_field_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_magnetic_field_vector()
| uint8_t TCMDEXEC_adcs_magnetic_field_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_measurements()
| uint8_t TCMDEXEC_adcs_measurements | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_nadir_vector()
| uint8_t TCMDEXEC_adcs_nadir_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_program_status()
| uint8_t TCMDEXEC_adcs_program_status | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_quaternion_error_vector()
| uint8_t TCMDEXEC_adcs_quaternion_error_vector | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_rate_sensor_rates()
| uint8_t TCMDEXEC_adcs_rate_sensor_rates | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_raw_cam1_sensor()
| uint8_t TCMDEXEC_adcs_raw_cam1_sensor | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_raw_cam2_sensor()
| uint8_t TCMDEXEC_adcs_raw_cam2_sensor | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_raw_coarse_sun_sensor_1_to_6()
| uint8_t TCMDEXEC_adcs_raw_coarse_sun_sensor_1_to_6 | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_raw_coarse_sun_sensor_7_to_10()
| uint8_t TCMDEXEC_adcs_raw_coarse_sun_sensor_7_to_10 | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_request_commissioning_telemetry()
| uint8_t TCMDEXEC_adcs_request_commissioning_telemetry | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request commissioning telemetry from the ADCS and save it to the onboard SD card.
- Parameters
-
args_str - Arg 0: Which commissioning step to request telemetry for (1-18)
- Arg 1: Log number (1 or 2)
- Arg 2: Destination SD card (0 = primary, 1 = secondary)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_reset()
| uint8_t TCMDEXEC_adcs_reset | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Note
- The ADCS will become unresponsive after sending this command for at least 15 seconds.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_run_once()
| uint8_t TCMDEXEC_adcs_run_once | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: If ADCS run mode is Triggered, run the ADCS sensor loop.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_save_config()
| uint8_t TCMDEXEC_adcs_save_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_save_image_to_sd()
| uint8_t TCMDEXEC_adcs_save_image_to_sd | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Save an image to the ADCS onboard SD card.
- Parameters
-
args_str - Arg 0: (int) Which camera to save the image from; can be Camera 1 (0), Camera 2 (1), or Star (2)
- Arg 1: (int) Resolution of the image to save; can be 1024x1024 (0), 512x512 (1), 256x256 (2), 128x128 (3), or 64x64 (4)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_save_orbit_params()
| uint8_t TCMDEXEC_adcs_save_orbit_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

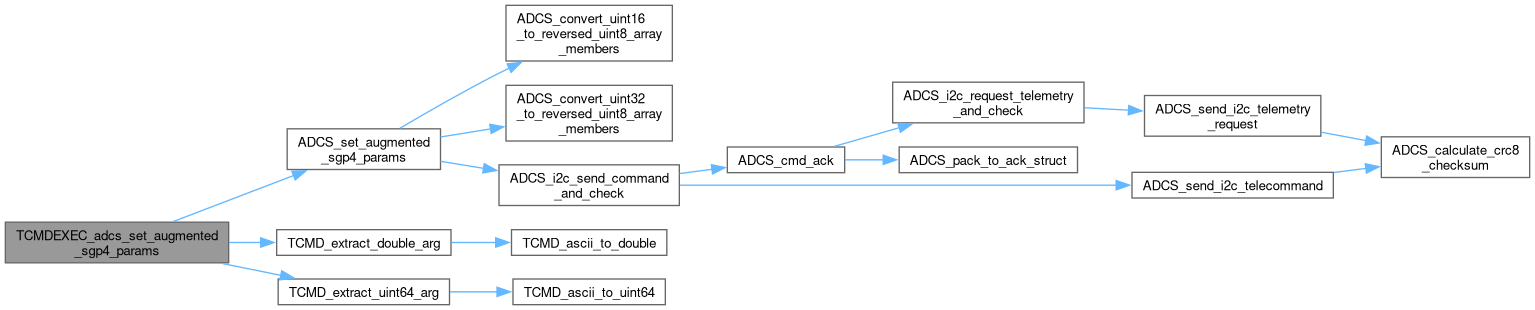
◆ TCMDEXEC_adcs_set_augmented_sgp4_params()
| uint8_t TCMDEXEC_adcs_set_augmented_sgp4_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: incl_coefficient (set inclination filter coefficient) (double)
- Arg 1: raan_coefficient (set RAAN filter coefficient) (double)
- Arg 2: ecc_coefficient (set eccentricity filter coefficient) (double)
- Arg 3: aop_coefficient (set argument of perigee filter coefficient) (double)
- Arg 4: time_coefficient (set time filter coefficient) (double)
- Arg 5: pos_coefficient (set position filter coefficient) (double)
- Arg 6: maximum_position_error (maximum position error for Augmented_SGP4 to continue working) (double)
- Arg 7: augmented_sgp4_filter (The type of filter being used (enum))
- Arg 8: xp_coefficient (polar coefficient xdouble; p) (double)
- Arg 9: yp_coefficient (polar coefficient ydouble; p) (double)
- Arg 10: gps_roll_over (GPS roll over number)
- Arg 11: position_sd (maximum position standard deviation for Augmented_SGP4 to continue working) (double)
- Arg 12: velocity_sd (maximum velocity standard deviation for Augmented_SGP4 to continue working) (double)
- Arg 13: min_satellites (Minimum satellites required for Augmented_SGP4 to continue working)
- Arg 14: time_gain (time offset compensation gain) (double)
- Arg 15: max_lag (maximum lagged timestamp measurements to incorporate) (double)
- Arg 16: min_samples (Minimum samples to use to get Augmented_SGP4)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
◆ TCMDEXEC_adcs_set_commanded_attitude_angles()
| uint8_t TCMDEXEC_adcs_set_commanded_attitude_angles | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: x attitude angle (double)
- Arg 1: y attitude angle (double)
- Arg 2: z attitude angle (double)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_commissioning_modes()
| uint8_t TCMDEXEC_adcs_set_commissioning_modes | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the run, power control, estimation, and control parameters for a given commissioning step.
- Note
- If a commissioning step requires other steps such as estimation parameters or TLMs, those must be supplied separately.
- Parameters
-
args_str - Arg 0: Which commissioning step to set the modes for (1-18)
- Arg 1: Timeout in seconds before reverting to no control (0 = indefinite)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_estimation_params()
| uint8_t TCMDEXEC_adcs_set_estimation_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: magnetometer_rate_filter_system_noise (float; magnetometer rate filter system noise covariance parameter)
- Arg 1: extended_kalman_filter_system_noise (float; extended kalman filter system noise covariance parameter)
- Arg 2: coarse_sun_sensor_measurement_noise (float; CSS measurement noise covariance parameter)
- Arg 3: sun_sensor_measurement_noise (float; sun sensor measurement noise covariance parameter)
- Arg 4: nadir_sensor_measurement_noise (float; nadir sensor measurement noise covariance parameter)
- Arg 5: magnetometer_measurement_noise (float; magnetometer measurement noise covariance parameter)
- Arg 6: star_tracker_measurement_noise (float; star tracker measurement noise covariance parameter)
- Arg 7: use_sun_sensor (bool; whether or not to use the sun sensor measurement in extended_kalman_filter)
- Arg 8: use_nadir_sensor (bool; whether or not to use the nadir sensor measurement in extended_kalman_filter)
- Arg 9: use_css (bool; whether or not to use the CSS measurement in extended_kalman_filter)
- Arg 10: use_star_tracker (bool; whether or not to use the star tracker measurement in extended_kalman_filter)
- Arg 11: nadir_sensor_terminator_test (bool; select to ignore nadir sensor measurements when terminator is in FOV)
- Arg 12: automatic_magnetometer_recovery (bool; select whether automatic switch to redundant magnetometer should occur in case of failure)
- Arg 13: magnetometer_mode (enum; select magnetometer mode for estimation and control)
- Arg 14: magnetometer_selection_for_raw_magnetometer_telemetry (enum; select magnetometer mode for the second raw telemetry frame)
- Arg 15: automatic_estimation_transition_due_to_rate_sensor_errors (bool; enable/disable automatic transition from MEMS rate estimation mode to RKF in case of rate sensor error)
- Arg 16: error_counter_reset_period_min (uint8; period after which a node's power cycle reset counter is cleared if no errors occurred)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_magnetometer_config()
| uint8_t TCMDEXEC_adcs_set_magnetometer_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: Mounting transform alpha angle [deg] (double)
- Arg 1: Mounting transform beta angle [deg] (double)
- Arg 2: Mounting transform gamma angle [deg] (double)
- Arg 3: Channel 1 offset value (double)
- Arg 4: Channel 2 offset value (double)
- Arg 5: Channel 3 offset value (double)
- Arg 6: Value (1, 1) of the magnetometer sensitivity matrix (double)
- Arg 7: Value (2, 2) of the magnetometer sensitivity matrix (double)
- Arg 8: Value (3, 3) of the magnetometer sensitivity matrix (double)
- Arg 9: Value (1, 2) of the magnetometer sensitivity matrix (double)
- Arg 10: Value (1, 3) of the magnetometer sensitivity matrix (double)
- Arg 11: Value (2, 1) of the magnetometer sensitivity matrix (double)
- Arg 12: Value (2, 3) of the magnetometer sensitivity matrix (double)
- Arg 13: Value (3, 1) of the magnetometer sensitivity matrix (double)
- Arg 14: Value (3, 2) of the magnetometer sensitivity matrix (double)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_magnetometer_mode()
| uint8_t TCMDEXEC_adcs_set_magnetometer_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the magnetometer mode of the ADCS.
- Parameters
-
args_str - Arg 0: magnetometer mode to set (0 = main sampled by Signal MCU, 1 = redundant sampled by Signal MCU, 2 = main sampled by Motor MCU, 3 = none)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_magnetorquer_output()
| uint8_t TCMDEXEC_adcs_set_magnetorquer_output | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the magnetorquer output values.
- Parameters
-
args_str - Arg 0: magnetorquer x duty cycle (double)
- Arg 1: magnetorquer y duty cycle (double)
- Arg 2: magnetorquer z duty cycle (double)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_power_control()
| uint8_t TCMDEXEC_adcs_set_power_control | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the power control mode of each component of the ADCS; for each, 0 turns the component off, 1 turns it on, and 2 keeps it the same as previously.
- Parameters
-
args_str - Arg 0: CubeControl signal power control mode
- Arg 1: CubeControl motor power control mode
- Arg 2: CubeSense 1 power control mode
- Arg 3: CubeSense 2 power control mode
- Arg 4: CubeStar power control mode
- Arg 5: CubeWheel 1 power control mode
- Arg 6: CubeWheel 2 power control mode
- Arg 7: CubeWheel 3 power control mode
- Arg 8: Motor power control mode
- Arg 9: GPS power control mode
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_rate_gyro_config()
| uint8_t TCMDEXEC_adcs_set_rate_gyro_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: gyro1 (Axis for Gyro #1; enum, options are pos/neg x, pos/neg y, pos/neg z)
- Arg 1: gyro2 (Axis for Gyro #2; enum, options are pos/neg x, pos/neg y, pos/neg z)
- Arg 2: gyro3 (Axis for Gyro #3; enum, options are pos/neg x, pos/neg y, pos/neg z)
- Arg 3: x_rate_offset (x-rate sensor offset) (double)
- Arg 4: y_rate_offset (y-rate sensor offset) (double)
- Arg 5: z_rate_offset (z-rate sensor offset) (double)
- Arg 6: rate_sensor_mult (multiplier of rate sensor measurement)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_run_mode()
| uint8_t TCMDEXEC_adcs_set_run_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Request the given telemetry data from the ADCS.
- Parameters
-
args_str - Arg 0: run mode to set; can be can be off (0), enabled (1), triggered (2), or simulation (3)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_sd_log_config()
| uint8_t TCMDEXEC_adcs_set_sd_log_config | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Repeatedly log given data from an SD card.
- Parameters
-
args_str - Arg 0: which_log; 1 or 2; which specific log number to log to the SD card
- Arg 1: log_array; Hex array of bitmasks for log config (10 hex bytes)
- Arg 2: log_period; Period to log data to the SD card; if zero, then disable logging
- Arg 3: which_sd; Which SD card to log to, 0 for primary, 1 for secondary
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_sgp4_orbit_params()
| uint8_t TCMDEXEC_adcs_set_sgp4_orbit_params | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the ADCS Simplified General Perturbations (SGP4) orbit parameters.
- Parameters
-
args_str - Arg 0: inclination (degrees) (double)
- Arg 1: eccentricity (dimensionless) (double)
- Arg 2: right ascension of the ascending node (degrees) (double)
- Arg 3: argument of perigee (degrees) (double)
- Arg 4: b-star drag term (dimensionless) (double)
- Arg 5: mean motion (orbits per day) (double)
- Arg 6: mean anomaly (degrees) (double)
- Arg 7: epoch (integer component is year, decimal component is day) (double)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_tracking_controller_target_reference()
| uint8_t TCMDEXEC_adcs_set_tracking_controller_target_reference | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the ADCS tracking controller target reference (location on Earth to point towards).
- Parameters
-
args_str - Arg 0: longitude (double)
- Arg 1: latitude (double)
- Arg 2: altitude (double)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_unix_time_save_mode()
| uint8_t TCMDEXEC_adcs_set_unix_time_save_mode | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Choose the circumstances to save the current Unix time.
- Parameters
-
args_str - Arg 0: whether to save the current Unix time immediately (bool passed as int; 1 = save immediately, 0 = don't save immediately)
- Arg 1: whether to save the current Unix time whenever a command is used to update it (bool passed as int; 1 = save on command, 0 = don't)
- Arg 2: whether to save the current Unix time periodically (bool passed as int; 1 = save periodically, 0 = don't)
- Arg 3: the period of saving the current Unix time (in seconds)
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

◆ TCMDEXEC_adcs_set_wheel_speed()
| uint8_t TCMDEXEC_adcs_set_wheel_speed | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Set the wheel speed of the ADCS.
- Parameters
-
args_str - Arg 0: wheel speed x value
- Arg 1: wheel speed y value
- Arg 2: wheel speed z value
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:

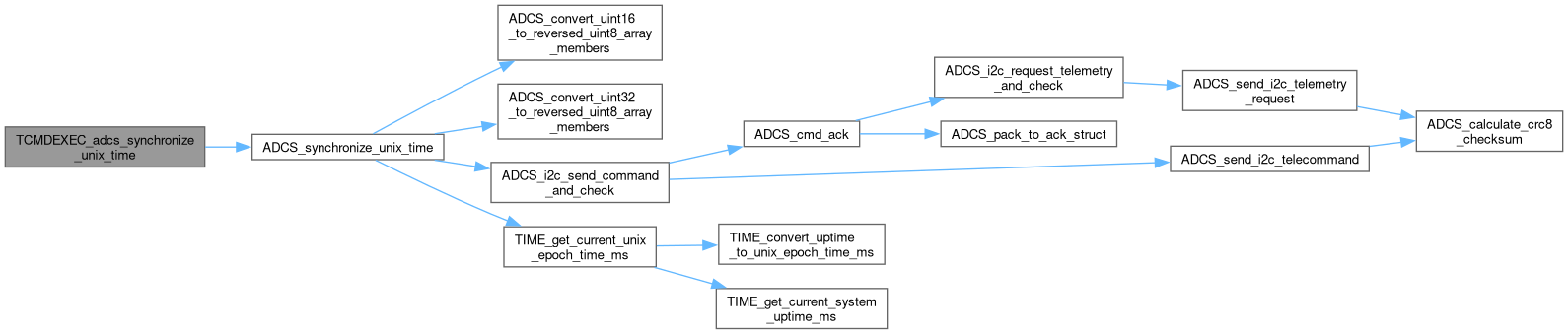
◆ TCMDEXEC_adcs_synchronize_unix_time()
| uint8_t TCMDEXEC_adcs_synchronize_unix_time | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Synchronize the current ADCS Unix epoch time.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
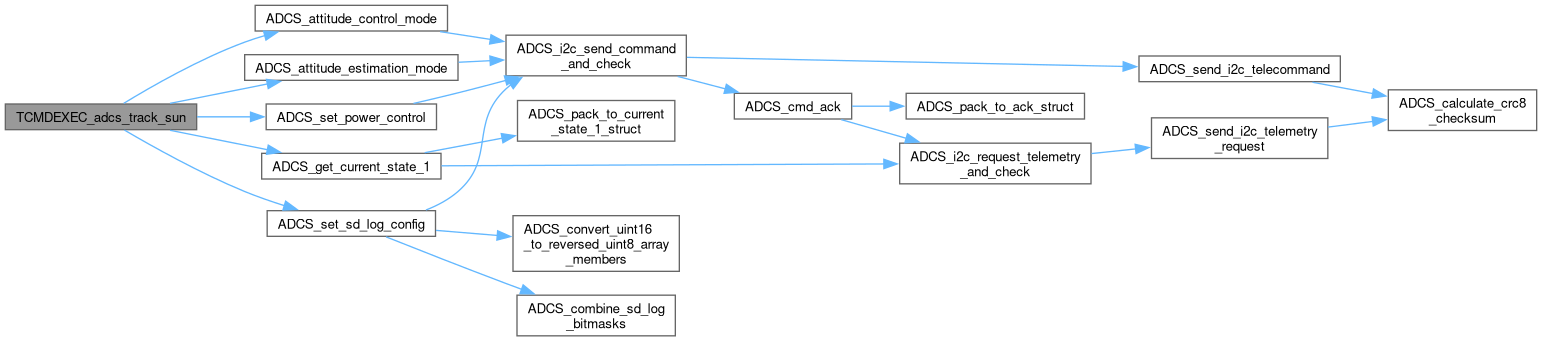
◆ TCMDEXEC_adcs_track_sun()
| uint8_t TCMDEXEC_adcs_track_sun | ( | const char * | args_str, |
| char * | response_output_buf, | ||
| uint16_t | response_output_buf_len ) |
Telecommand: Automatically track the sun with the ADCS.
- Note
- The satellite must be already in Y-Momentum mode (i.e. stable attitude) to do this successfully. Rate Gyro Offsets must be set.
- Parameters
-
args_str - No arguments for this command
- Returns
- 0 on success, >0 on error
Here is the call graph for this function:
Generated by