#include "rtos_tasks/rtos_background_upkeep.h"#include "log/log.h"#include "config/configuration.h"#include "timekeeping/timekeeping.h"#include "rtos_tasks/rtos_task_helpers.h"#include "transforms/arrays.h"#include "main.h"#include "rtos_tasks/rtos_tasks_rx_telecommands.h"#include "comms_drivers/rf_antenna_switch.h"#include "comms_drivers/comms_tx.h"#include "log/lazy_file_log_sink.h"#include "eps_drivers/eps_power_management.h"#include "eps_drivers/eps_time.h"#include "eps_drivers/eps_commands.h"#include "gnss_receiver/gnss_firehose_storage.h"#include "littlefs/littlefs_helper.h"#include "stm32/stm32_reboot_reason.h"#include "adcs_drivers/adcs_commands.h"#include "transforms/number_comparisons.h"#include "telecommand_exec/agenda_from_file.h"#include "cmsis_os.h"#include <inttypes.h>#include <stdint.h>#include <stdio.h>
Include dependency graph for rtos_background_upkeep.c:
Functions | |
| static void | subtask_disable_adcs_if_eps_enters_safety_mode (void) |
| static void | subtask_monitor_eps_power (void) |
| static void | subtask_reset_system_after_very_long_uptime (void) |
| If the system exceeds a very long uptime, reset the system. | |
| static void | subtask_reset_system_after_no_recent_uplinks (void) |
| If the system has not received an uplink in a very long time, reset the system. | |
| static void | subtask_update_rf_switch (void) |
| Update the RF switch state based on the current mode. | |
| static void | subtask_send_beacon (void) |
| static void | subtask_sync_obc_time_based_on_eps_time (void) |
| static void | subtask_write_boot_time_to_lfs (void) |
| A minute after bootup, append a JSONL line to LFS_BOOT_LOG_FILE_NAME with the latest boot timestamp. | |
| static void | subtask_enqueue_tcmds_from_agenda_file (void) |
| Enqueue telecommands from the TCMD_active_agenda_filename file. | |
| void | TASK_background_upkeep (void *argument) |
Variables | |
| static const char * | LFS_BOOT_LOG_FILE_NAME = "obc_boot_log.jsonl" |
| uint32_t | STM32_system_reset_interval_sec = 604800 |
| If the system uptime exceeds this value, the system will reset (reboot). | |
| uint32_t | STM32_system_reset_no_uplink_interval_sec = 216000 |
| If the duration since an AX100 uplink telecommand exceeds this value, the system will reset (reboot). | |
| uint32_t | EPS_monitor_safety_adcs_interval_ms = 20000 |
| Check whether the EPS is in safety mode. If it's in safety mode, disable all EPS power channels. | |
| uint32_t | EPS_time_sync_period_sec = 600 |
| How frequently to set the OBC time based on the EPS time if the time divergence is >2 seconds. | |
| uint32_t | EPS_max_time_deviation_for_sync_ms = 2000 |
| If the OBC time and EPS time differ by more than this value, the OBC time will be set based on the EPS time. | |
| uint32_t | COMMS_beacon_interval_ms = 20000 |
| Interval between basic beacon packets, in ms. | |
| static const uint32_t | COMMS_beacon_interval_ms_default_value = 20000 |
| uint32_t | TCMD_enqueue_from_agenda_file_interval_ms = 45000 |
| Interval between enqueuing telecommands from the agenda file, in ms. | |
| uint32_t | TCMD_enqueue_grace_period_ms = 15000 |
| When enqueuing telecommands from a file, gracefully handle time resync values <= this value. | |
| uint32_t | COMMS_total_beacon_count_since_boot = 0 |
| static uint32_t | EPS_monitor_last_uptime_ms = 0 |
| static uint32_t | monitor_eps_to_control_adcs_last_checked_uptime_ms = 0 |
| static uint32_t | last_beacon_send_time_ms = 0 |
| static uint32_t | uptime_of_last_eps_time_sync_ms = 0 |
Function Documentation
◆ subtask_disable_adcs_if_eps_enters_safety_mode()
|
static |
Here is the call graph for this function:
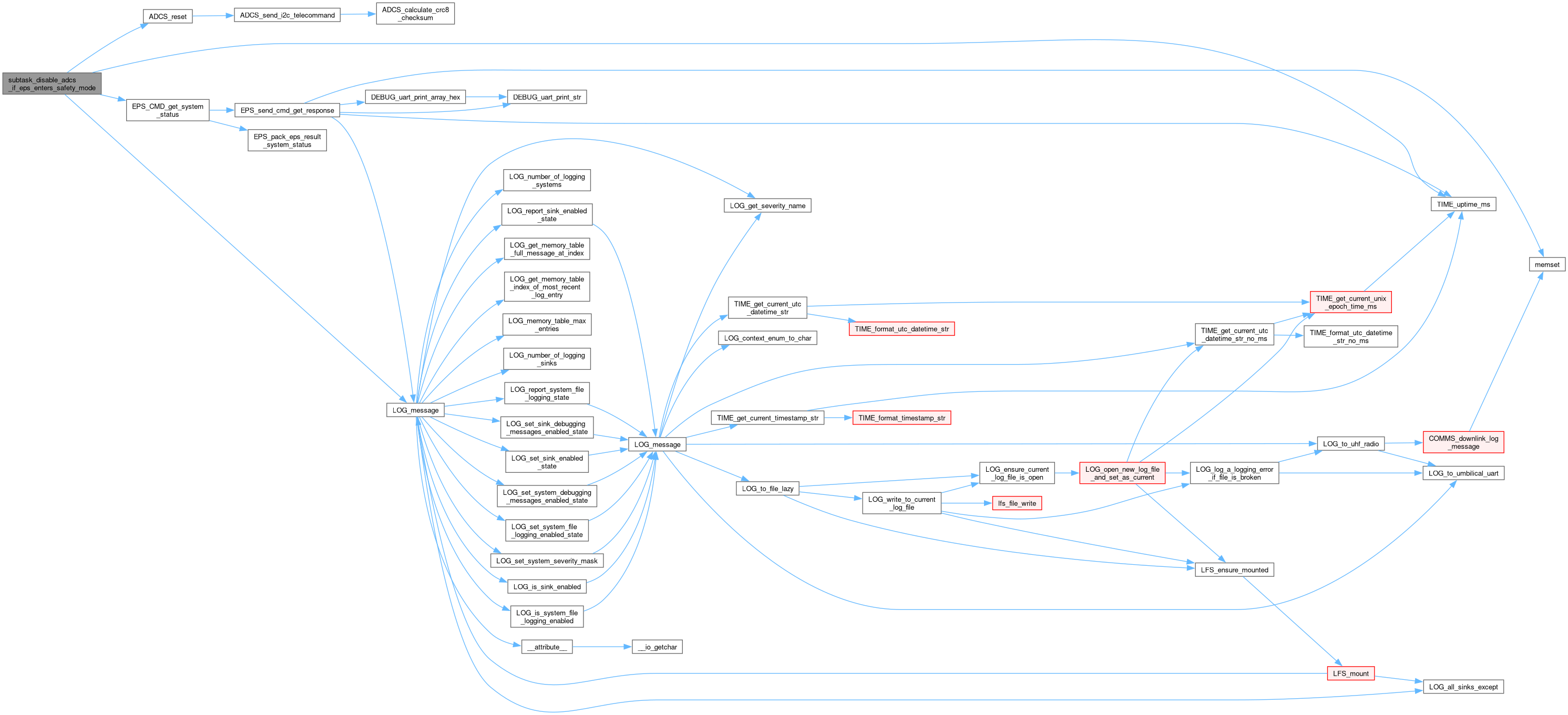
Here is the caller graph for this function:

◆ subtask_enqueue_tcmds_from_agenda_file()
|
static |
Enqueue telecommands from the TCMD_active_agenda_filename file.
- Parameters
-
<br>
On each run, enqueue telecommands from the agenda file.
- Nominally (no large time resyncs), enqueue telecommands with tsexec from the last enqueue runtime until <run interval> in the future.
- In case of large time resyncs fordward in time (including the first run), enqueue telecommands with tsexec within the last 15 seconds max, potentially discarding older chunks of the agenda.
- In case of large time resyncs backward in time (rare, off-nominal), commands maybe be re-enqueued and re-executed (unless tssent unique enforcement is enabled).
Here is the call graph for this function:
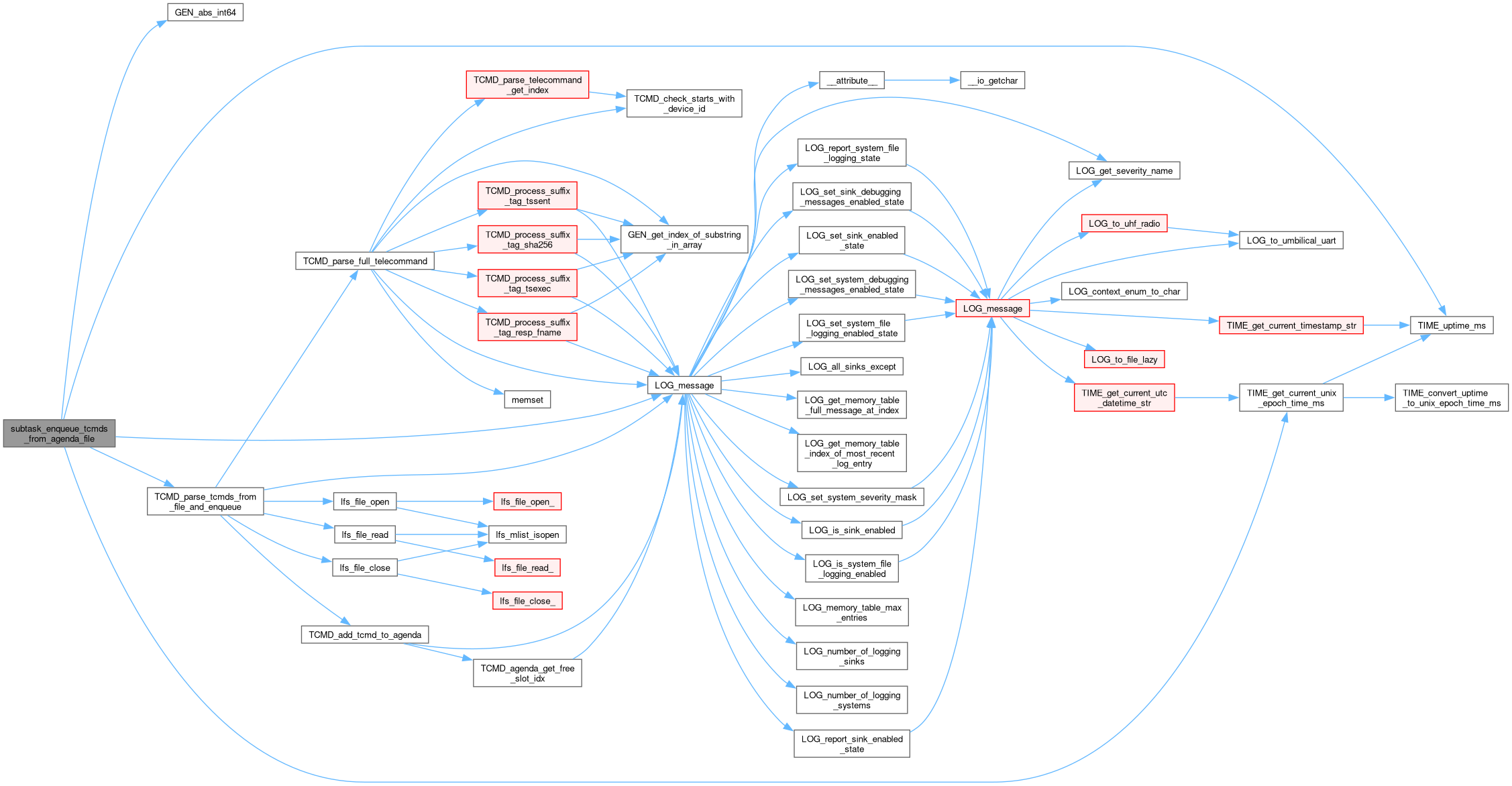
Here is the caller graph for this function:

◆ subtask_monitor_eps_power()
|
static |
Here is the call graph for this function:
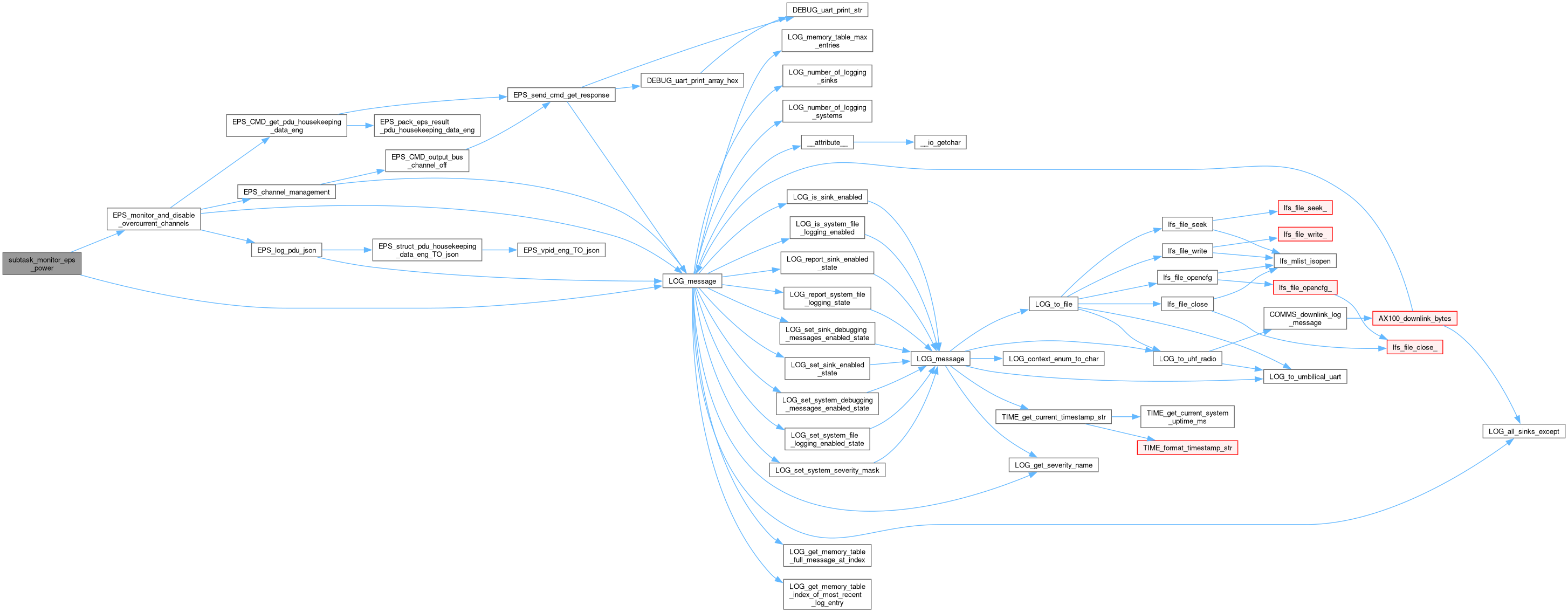
Here is the caller graph for this function:

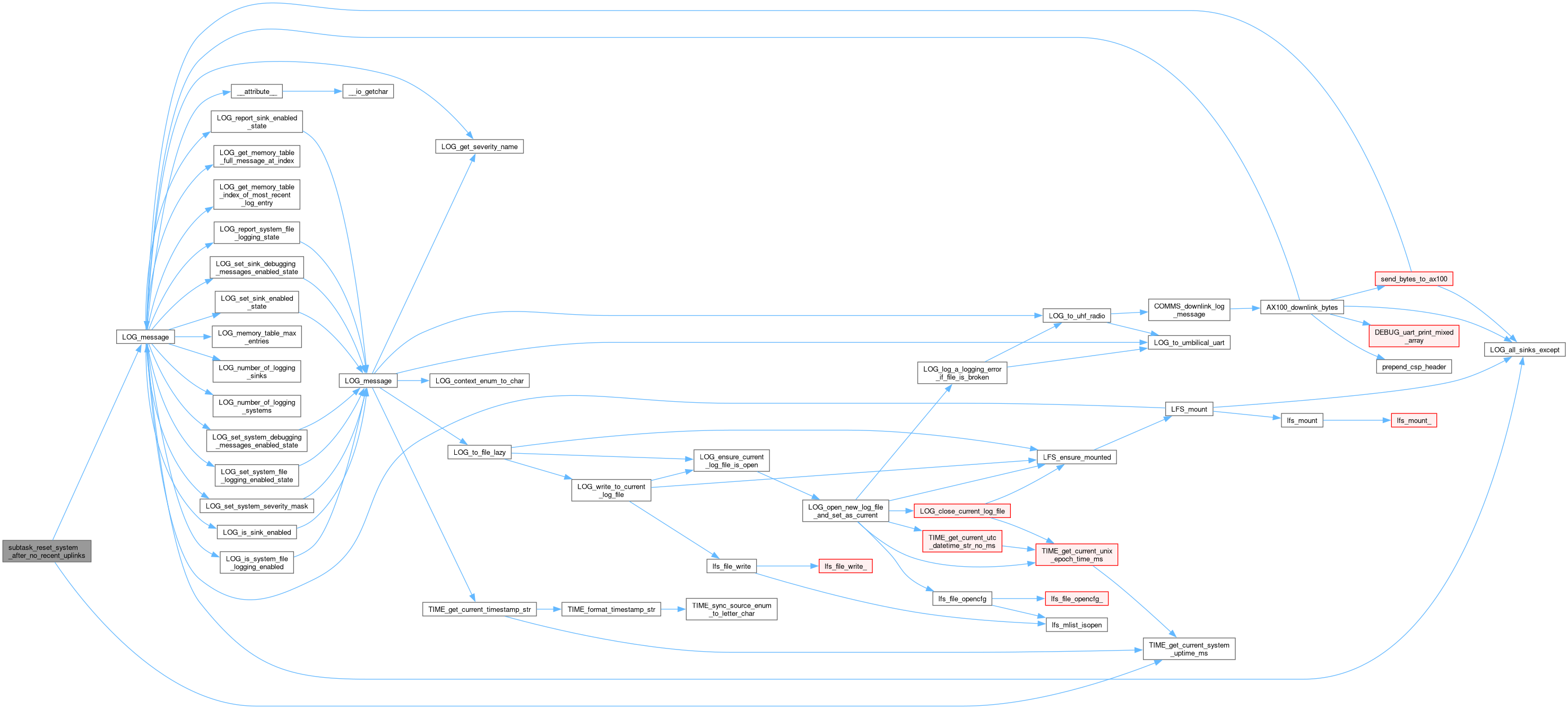
◆ subtask_reset_system_after_no_recent_uplinks()
|
static |
If the system has not received an uplink in a very long time, reset the system.
- Parameters
-
<br>
- Note
- Associated issue: https://github.com/CalgaryToSpace/CTS-SAT-1-OBC-Firmware/issues/547
- The intenion of this function is to recover the system in case of a radiation-induced hang that isn't caught by the watchdog timer. The configuration can be extended to even longer if necessary.
Here is the call graph for this function:
Here is the caller graph for this function:

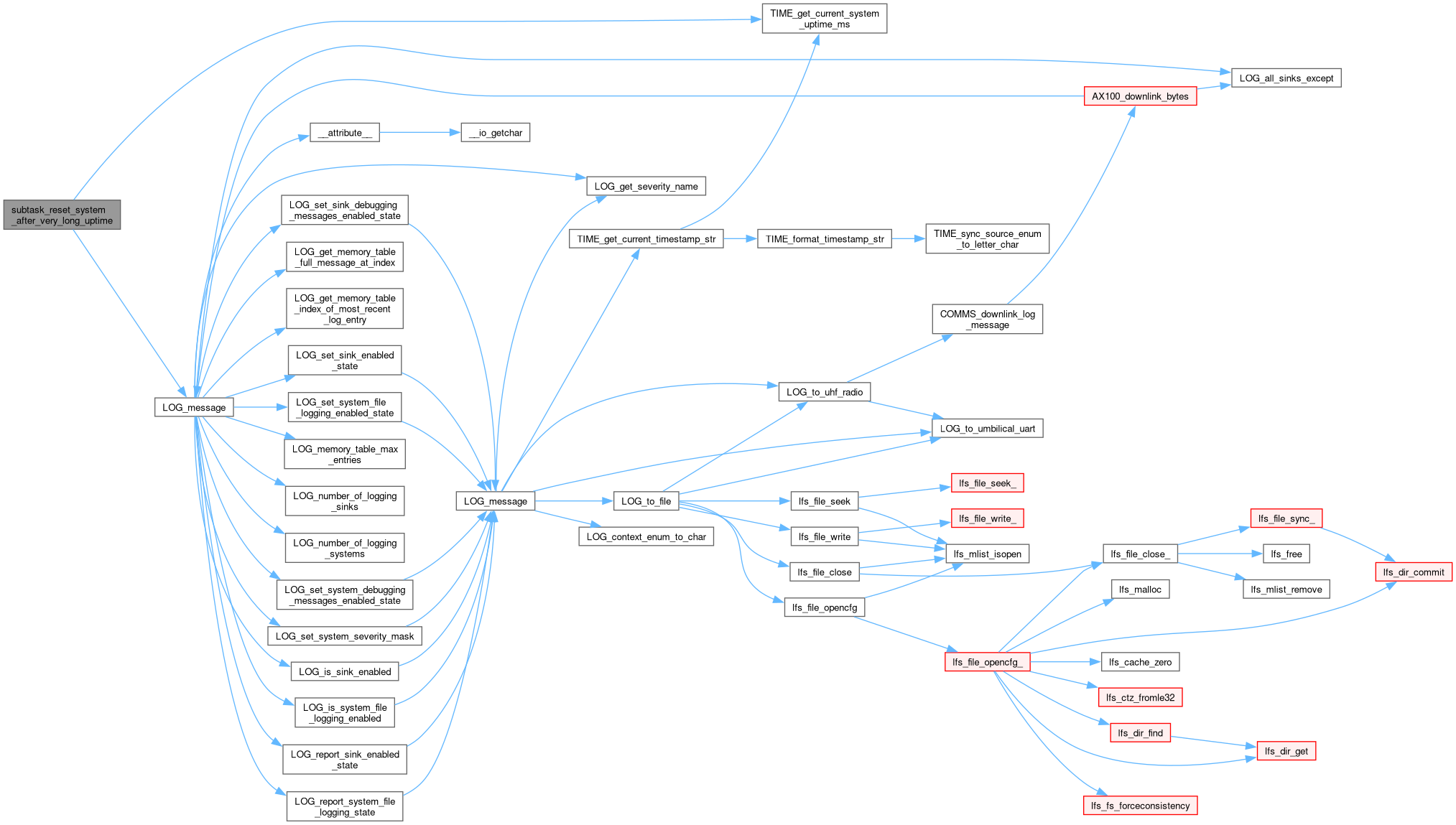
◆ subtask_reset_system_after_very_long_uptime()
|
static |
If the system exceeds a very long uptime, reset the system.
- Parameters
-
<br>
- Note
- Associated issue: https://github.com/CalgaryToSpace/CTS-SAT-1-OBC-Firmware/issues/282
- The intenion of this function is to recover the system in case of a radiation-induced hang that isn't caught by the watchdog timer. The configuration can be extended to even longer if necessary.
Here is the call graph for this function:
Here is the caller graph for this function:

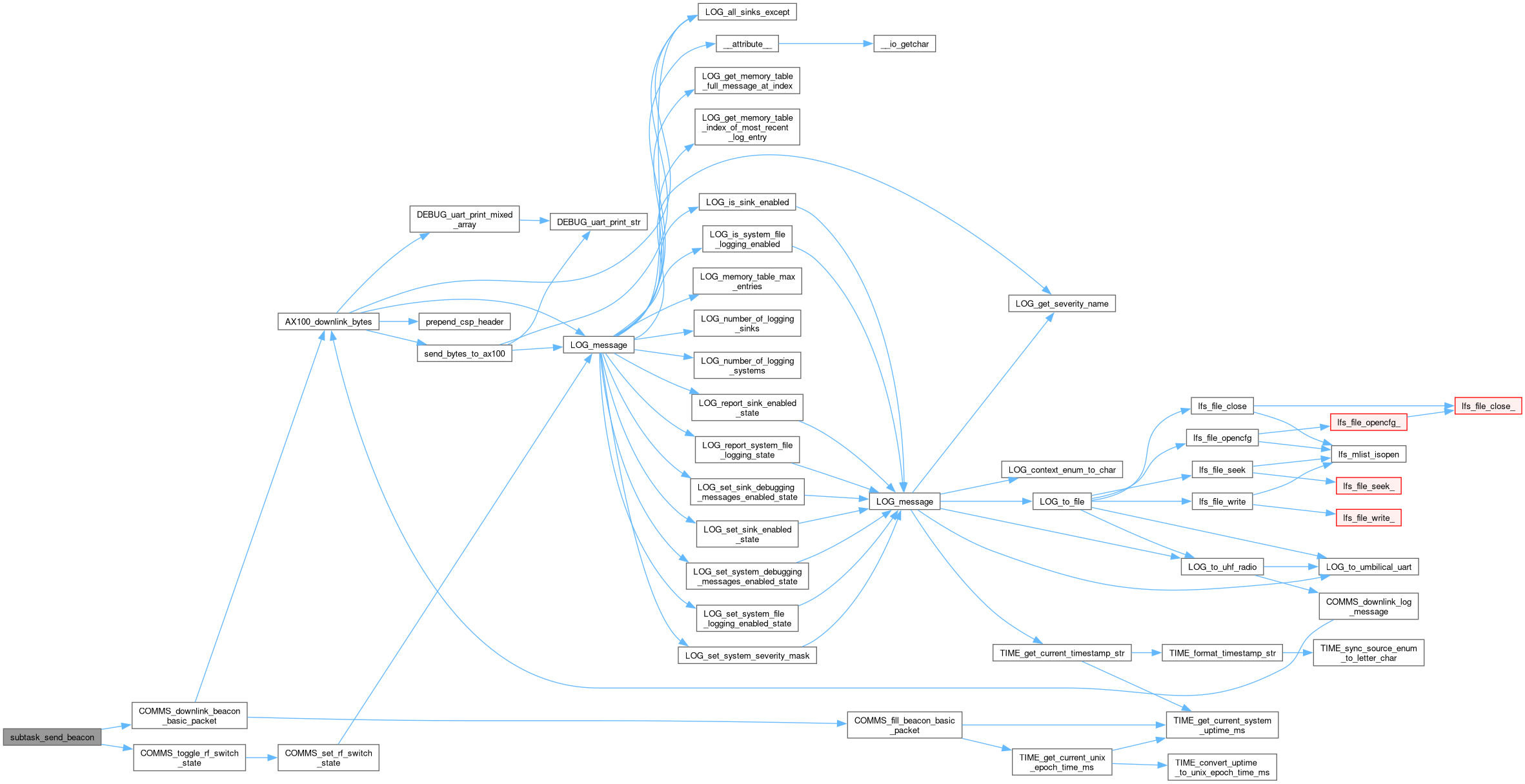
◆ subtask_send_beacon()
|
static |
Here is the call graph for this function:
Here is the caller graph for this function:

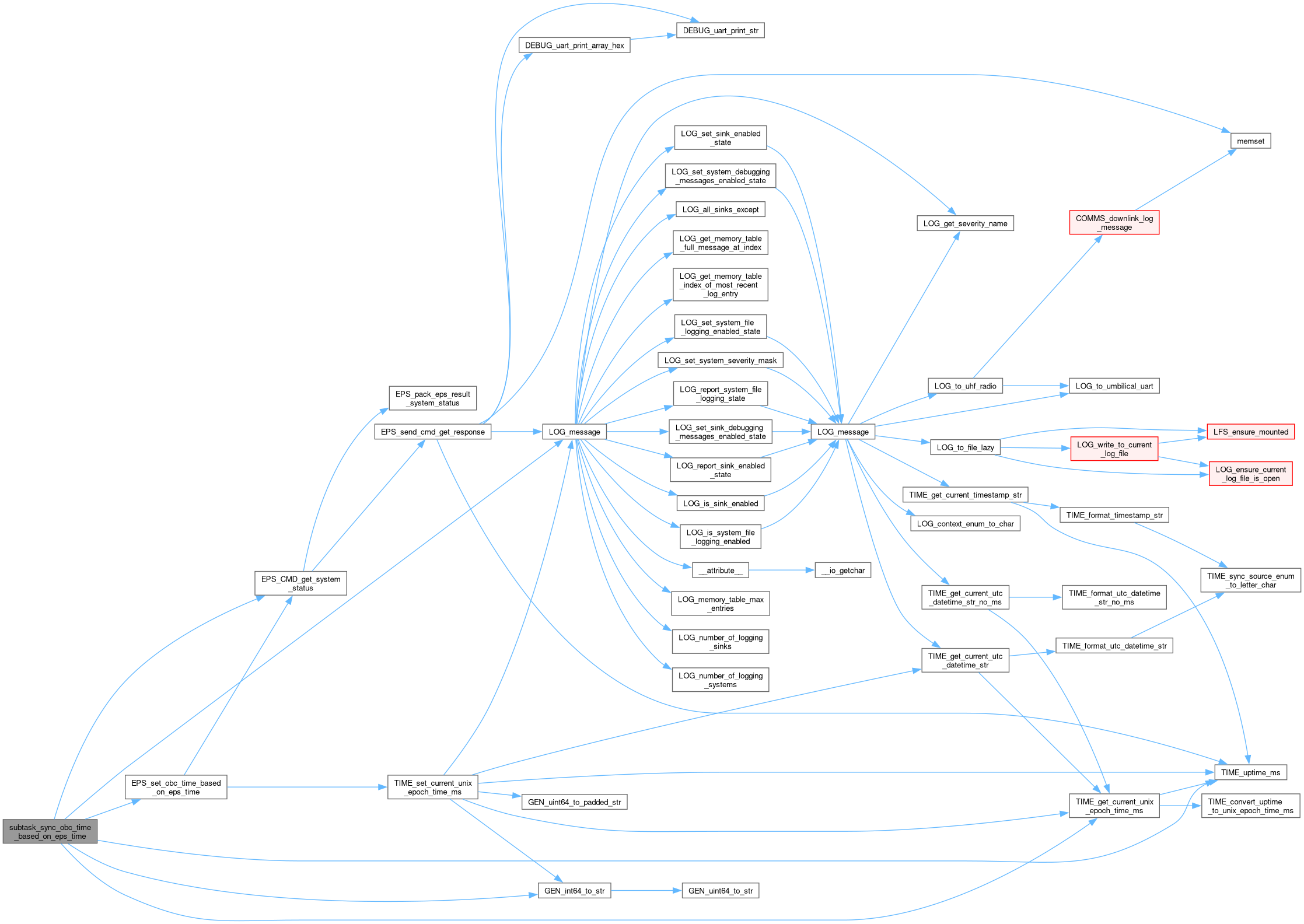
◆ subtask_sync_obc_time_based_on_eps_time()
|
static |
Periodically check the OBC time against the EPS time, and then set the OBC time based on the EPS time if they diverge by more than 2000ms (or as configured). We make an assumption here that the EPS's time is going to be more reliable/accurate than the OBC's time, since the EPS uses a high-quality RTC.
Here is the call graph for this function:
Here is the caller graph for this function:

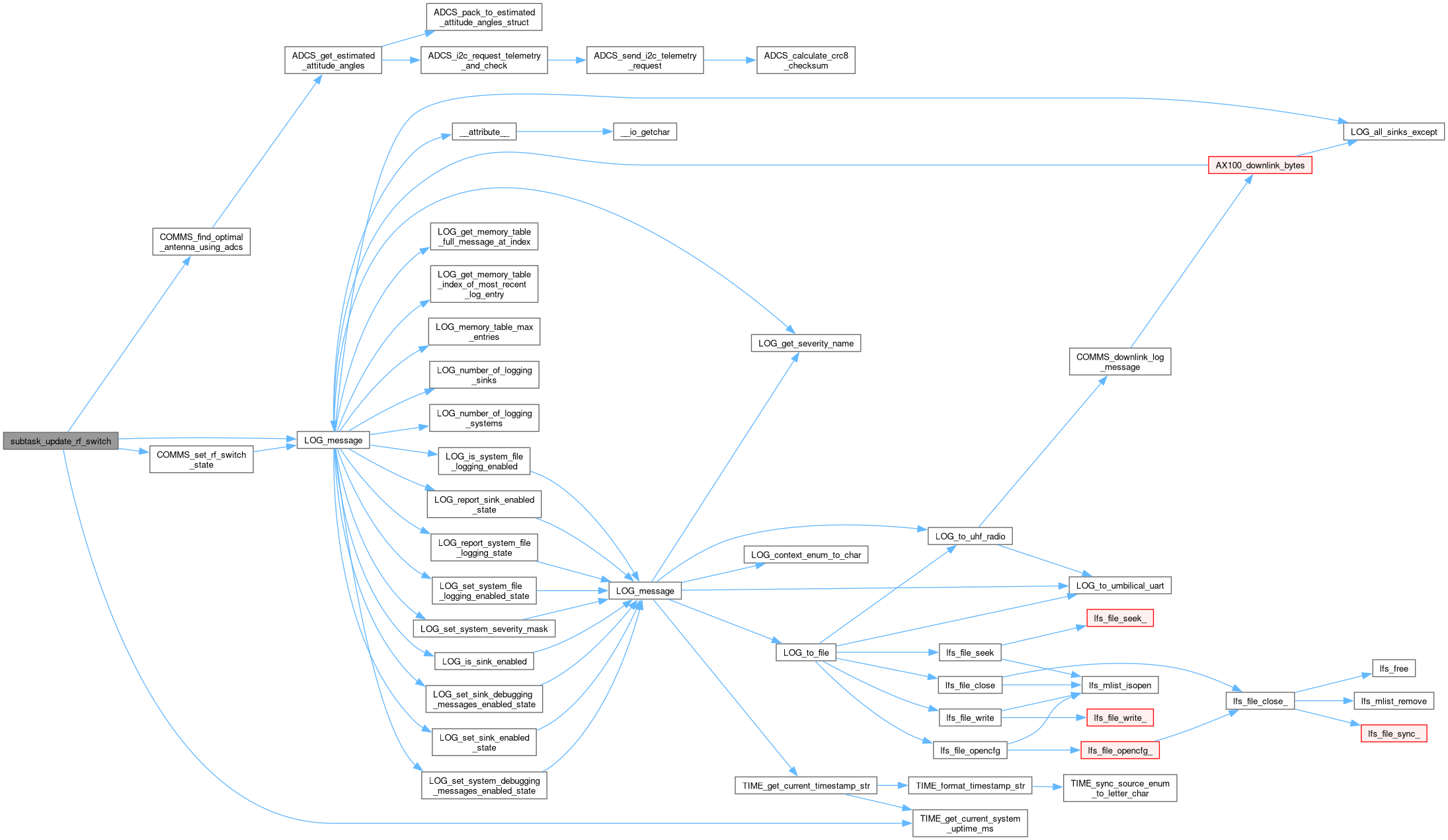
◆ subtask_update_rf_switch()
|
static |
Update the RF switch state based on the current mode.
- Note
- Implemented per https://github.com/CalgaryToSpace/CTS-SAT-1-OBC-Firmware/issues/228
Here is the call graph for this function:
Here is the caller graph for this function:

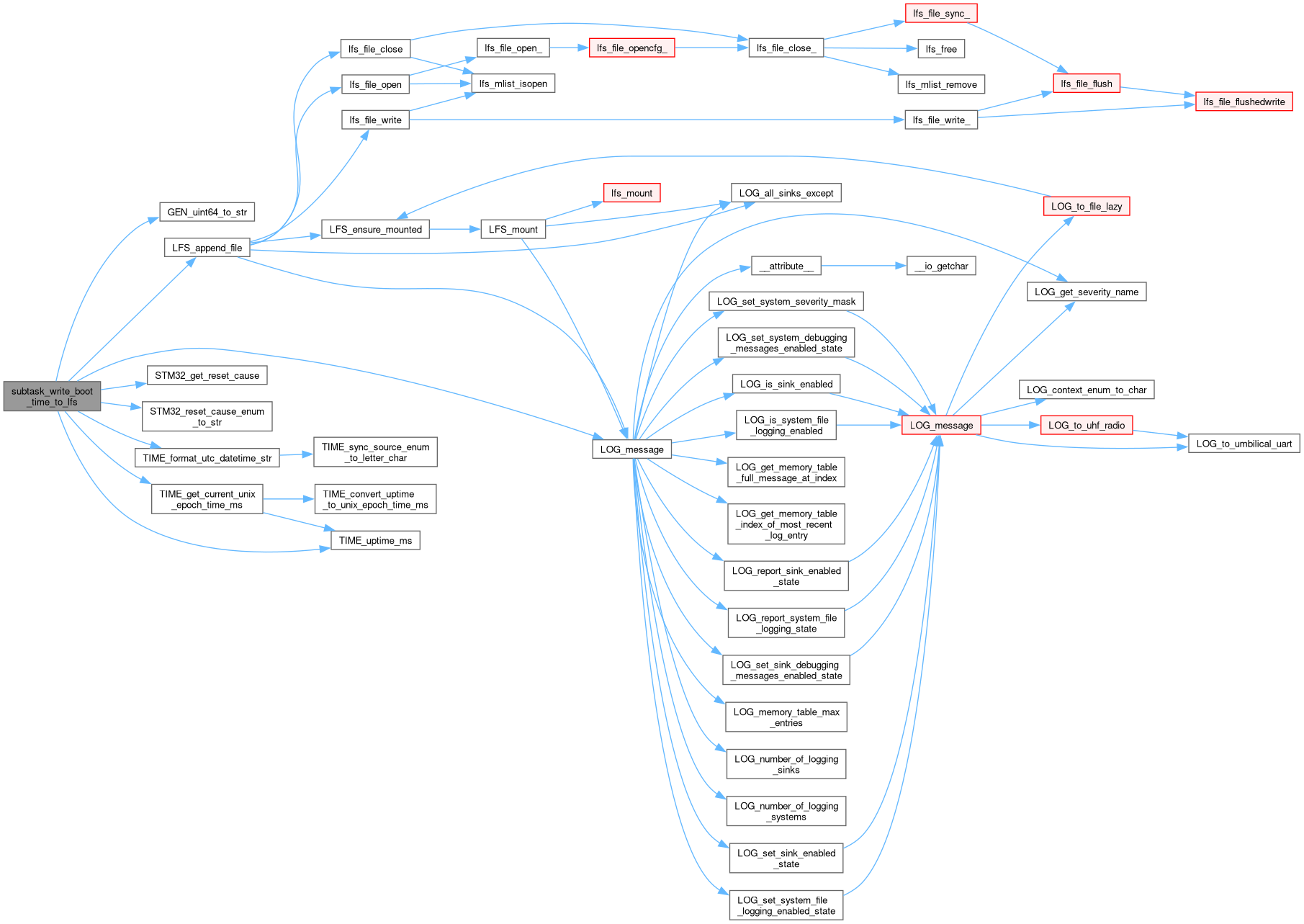
◆ subtask_write_boot_time_to_lfs()
|
static |
A minute after bootup, append a JSONL line to LFS_BOOT_LOG_FILE_NAME with the latest boot timestamp.
- Note
- We wait a minute after boot in case LFS writes are the cause of the reset to allow for debugging/formatting/etc.
Here is the call graph for this function:
Here is the caller graph for this function:

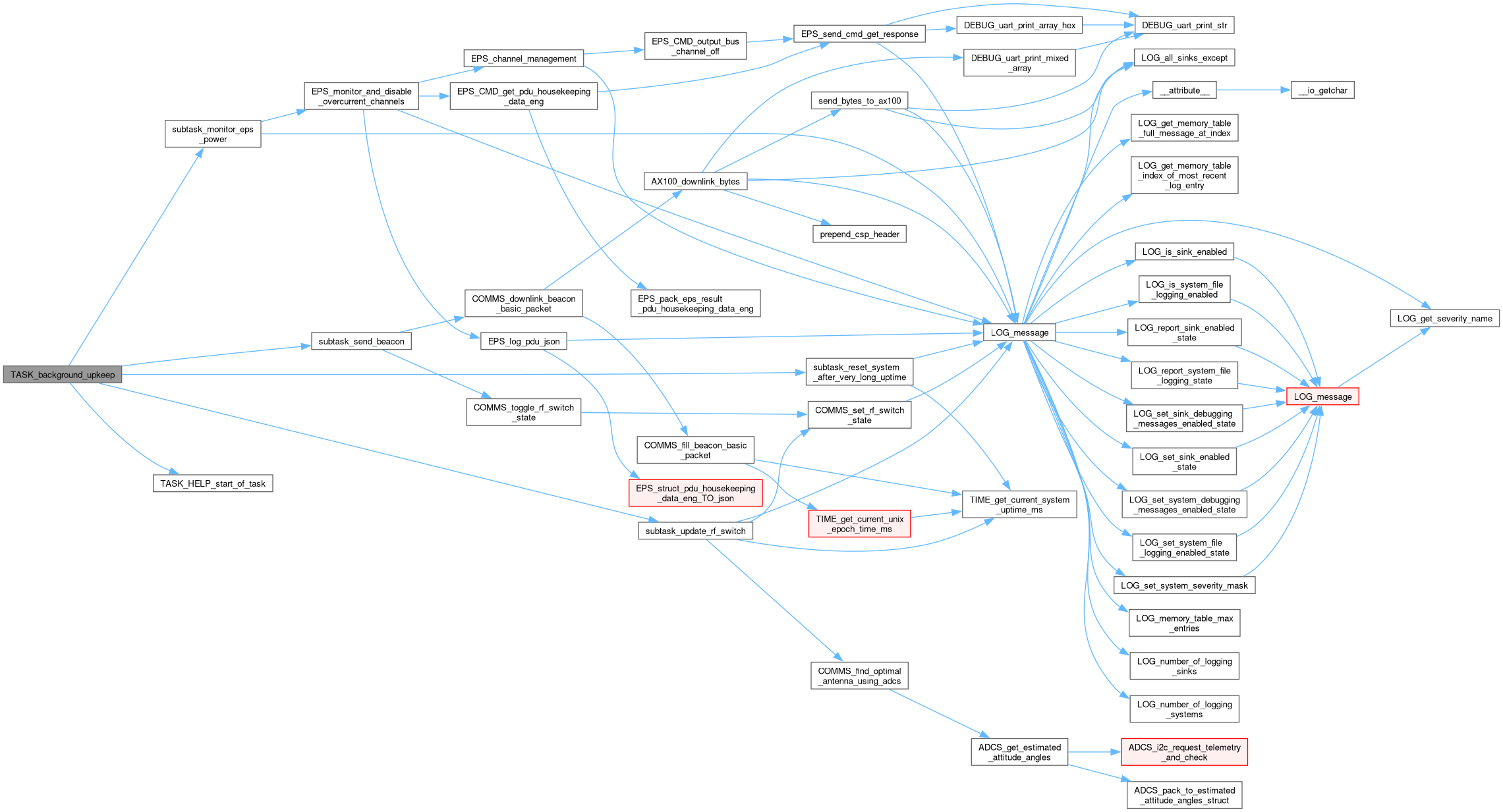
◆ TASK_background_upkeep()
| void TASK_background_upkeep | ( | void * | argument | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ COMMS_beacon_interval_ms
| uint32_t COMMS_beacon_interval_ms = 20000 |
Interval between basic beacon packets, in ms.
- Note
- Default: 20000 ms = 20 seconds (fastest rate we're globally authorized for).
◆ COMMS_beacon_interval_ms_default_value
|
static |
◆ COMMS_total_beacon_count_since_boot
| uint32_t COMMS_total_beacon_count_since_boot = 0 |
◆ EPS_max_time_deviation_for_sync_ms
| uint32_t EPS_max_time_deviation_for_sync_ms = 2000 |
If the OBC time and EPS time differ by more than this value, the OBC time will be set based on the EPS time.
- Note
- Default: 2000 ms = 2 seconds.
- Strongly related to EPS_time_sync_period_sec.
- Recommendation: Do not set to < 1500-2000ms, as the EPS time is only granular to 1 second.
◆ EPS_monitor_last_uptime_ms
|
static |
◆ EPS_monitor_safety_adcs_interval_ms
| uint32_t EPS_monitor_safety_adcs_interval_ms = 20000 |
Check whether the EPS is in safety mode. If it's in safety mode, disable all EPS power channels.
- Note
- Default: 20000 ms = 20 seconds
- Set to 0 to disable this feature.
◆ EPS_time_sync_period_sec
| uint32_t EPS_time_sync_period_sec = 600 |
How frequently to set the OBC time based on the EPS time if the time divergence is >2 seconds.
- Note
- Default: 600 seconds = 10 minutes.
- Set to 0 to disable time syncing.
◆ last_beacon_send_time_ms
|
static |
◆ LFS_BOOT_LOG_FILE_NAME
|
static |
◆ monitor_eps_to_control_adcs_last_checked_uptime_ms
|
static |
◆ STM32_system_reset_interval_sec
| uint32_t STM32_system_reset_interval_sec = 604800 |
If the system uptime exceeds this value, the system will reset (reboot).
- Note
- This is to recover the system in case of a radiation-induced hang or other invalid state.
- Default: 604800 sec = 7 days.
- Set to 0 to disable this feature.
◆ STM32_system_reset_no_uplink_interval_sec
| uint32_t STM32_system_reset_no_uplink_interval_sec = 216000 |
If the duration since an AX100 uplink telecommand exceeds this value, the system will reset (reboot).
- Note
- This is to recover the system in case of a radiation-induced hang or other invalid state.
- Default: 216000 sec = 2.5 days.
- Set to 0 to disable this feature.
◆ TCMD_enqueue_from_agenda_file_interval_ms
| uint32_t TCMD_enqueue_from_agenda_file_interval_ms = 45000 |
Interval between enqueuing telecommands from the agenda file, in ms.
- Note
- Default: 45000 ms = 45 seconds
◆ TCMD_enqueue_grace_period_ms
| uint32_t TCMD_enqueue_grace_period_ms = 15000 |
When enqueuing telecommands from a file, gracefully handle time resync values <= this value.
- Note
- Default: 15000 ms = 15 seconds
- If the time resync is more than this value, then a chunk of the agenda file will be discarded, or commands may be re-enqueued and re-executed.
◆ uptime_of_last_eps_time_sync_ms
|
static |
Generated by