#include "adcs_drivers/adcs_types.h"#include "adcs_drivers/adcs_command_ids.h"#include "adcs_drivers/adcs_struct_packers.h"#include "adcs_drivers/adcs_types_to_json.h"#include "adcs_drivers/adcs_commands.h"#include "adcs_drivers/adcs_internal_drivers.h"#include "adcs_drivers/adcs_types_enum_to_str.h"#include "timekeeping/timekeeping.h"#include "log/log.h"#include "stm32/stm32_watchdog.h"#include <string.h>#include <stdio.h>#include <stdbool.h>#include <math.h>#include "stm32l4xx_hal.h"
Include dependency graph for adcs_commands.c:
Functions | |
| uint8_t | ADCS_initialize () |
| Initialize the ADCS CRC, timestamp, and file system directory. | |
| uint8_t | ADCS_cmd_ack (ADCS_cmd_ack_struct_t *ack) |
| Instructs the ADCS to determine whether the last command succeeded. (Doesn't work for telemetry requests, by design.). | |
| uint8_t | ADCS_reset () |
| Instruct the ADCS to execute the ADCS_Reset command. | |
| uint8_t | ADCS_get_identification (ADCS_id_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Identification command. | |
| uint8_t | ADCS_get_program_status (ADCS_boot_running_status_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Program_Status command. | |
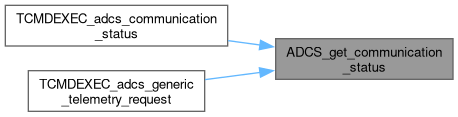
| uint8_t | ADCS_get_communication_status (ADCS_comms_status_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Communication_Status command. | |
| uint8_t | ADCS_deploy_magnetometer (uint8_t deploy_timeout) |
| Instruct the ADCS to execute the ADCS_Deploy_Magnetometer command. | |
| uint8_t | ADCS_set_run_mode (ADCS_run_mode_enum_t mode) |
| Instruct the ADCS to execute the ADCS_Set_Run_Mode command. | |
| uint8_t | ADCS_clear_errors () |
| Instruct the ADCS to execute the ADCS_Clear_Errors command. | |
| uint8_t | ADCS_attitude_control_mode (ADCS_control_mode_enum_t mode, uint16_t timeout) |
| Instruct the ADCS to execute the titular command. | |
| uint8_t | ADCS_attitude_estimation_mode (ADCS_estimation_mode_enum_t mode) |
| Instruct the ADCS to execute the ADCS_Attitude_Estimation_Mode command. | |
| uint8_t | ADCS_run_once () |
| Instruct the ADCS to execute the ADCS_Run_Once command. | |
| uint8_t | ADCS_set_magnetometer_mode (ADCS_magnetometer_mode_enum_t mode) |
| Instruct the ADCS to execute the titular command. | |
| uint8_t | ADCS_set_magnetorquer_output (double x_duty, double y_duty, double z_duty) |
| Instruct the ADCS to execute the ADCS_Set_Magnetorquer_Output command. | |
| uint8_t | ADCS_set_wheel_speed (int16_t x_speed, int16_t y_speed, int16_t z_speed) |
| Instruct the ADCS to execute the titular command. | |
| uint8_t | ADCS_set_power_control (ADCS_power_select_enum_t cube_control_signal, ADCS_power_select_enum_t cube_control_motor, ADCS_power_select_enum_t cube_sense1, ADCS_power_select_enum_t cube_sense2, ADCS_power_select_enum_t cube_star_power, ADCS_power_select_enum_t cube_wheel1_power, ADCS_power_select_enum_t cube_wheel2_power, ADCS_power_select_enum_t cube_wheel3_power, ADCS_power_select_enum_t motor_power, ADCS_power_select_enum_t gps_power) |
| Set the power control mode of each component of the ADCS; for each, 0 turns the component off, 1 turns it on, and 2 keeps it the same as previously. | |
| uint8_t | ADCS_get_power_control (ADCS_power_control_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Power_Control command. | |
| uint8_t | ADCS_set_magnetometer_config (double mounting_transform_alpha_angle, double mounting_transform_beta_angle, double mounting_transform_gamma_angle, double channel_1_offset, double channel_2_offset, double channel_3_offset, double sensitivity_matrix_s11, double sensitivity_matrix_s22, double sensitivity_matrix_s33, double sensitivity_matrix_s12, double sensitivity_matrix_s13, double sensitivity_matrix_s21, double sensitivity_matrix_s23, double sensitivity_matrix_s31, double sensitivity_matrix_s32) |
| Instruct the ADCS to set the magnetometer configuration. | |
| uint8_t | ADCS_save_config () |
| Instruct the ADCS to execute the ADCS_Save_Config command. | |
| uint8_t | ADCS_save_orbit_params () |
| Instruct the ADCS to execute the ADCS_Save_Orbit_Params command. | |
| uint8_t | ADCS_get_estimate_angular_rates (ADCS_angular_rates_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Estimate_Angular_Rates command. | |
| uint8_t | ADCS_get_llh_position (ADCS_llh_position_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_LLH_Position command. | |
| uint8_t | ADCS_bootloader_clear_errors () |
| Instruct the ADCS to execute the ADCS_Bootloader_Clear_Errors command. | |
| uint8_t | ADCS_set_unix_time_save_mode (bool save_now, bool save_on_update, bool save_periodic, uint8_t period_s) |
| Instruct the ADCS to execute the ADCS_Set_Unix_Time_Save_Mode command. | |
| uint8_t | ADCS_get_unix_time_save_mode (ADCS_set_unix_time_save_mode_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Unix_Time_Save_Mode command. | |
| uint8_t | ADCS_set_sgp4_orbit_params (double inclination, double eccentricity, double ascending_node_right_ascension, double perigee_argument, double b_star_drag_term, double mean_motion, double mean_anomaly, double epoch) |
| Instruct the ADCS to execute the ADCS_Set_SGP4_Orbit_Params command. | |
| uint8_t | ADCS_get_sgp4_orbit_params (ADCS_orbit_params_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_SGP4_Orbit_Params command. | |
| uint8_t | ADCS_get_rate_sensor_rates (ADCS_rated_sensor_rates_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Rate_Sensor_Rates command. | |
| uint8_t | ADCS_get_wheel_speed (ADCS_wheel_speed_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Wheel_Speed command. | |
| uint8_t | ADCS_get_magnetorquer_command (ADCS_magnetorquer_command_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Magnetorquer_Command command. | |
| uint8_t | ADCS_get_raw_magnetometer_values (ADCS_raw_magnetometer_values_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Raw_Magnetometer_Values command. | |
| uint8_t | ADCS_get_estimate_fine_angular_rates (ADCS_fine_angular_rates_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Estimate_Fine_Angular_Rates command. | |
| uint8_t | ADCS_get_magnetometer_config (ADCS_magnetometer_config_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Magnetometer_Config command. | |
| uint8_t | ADCS_get_commanded_attitude_angles (ADCS_commanded_angles_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Commanded_Attitude_Angles command. | |
| uint8_t | ADCS_set_commanded_attitude_angles (double x, double y, double z) |
| Instruct the ADCS to execute the ADCS_Set_Commanded_Attitude_Angles command. | |
| uint8_t | ADCS_set_estimation_params (float magnetometer_rate_filter_system_noise, float extended_kalman_filter_system_noise, float coarse_sun_sensor_measurement_noise, float sun_sensor_measurement_noise, float nadir_sensor_measurement_noise, float magnetometer_measurement_noise, float star_tracker_measurement_noise, bool use_sun_sensor, bool use_nadir_sensor, bool use_css, bool use_star_tracker, bool nadir_sensor_terminator_test, bool automatic_magnetometer_recovery, ADCS_magnetometer_mode_enum_t magnetometer_mode, ADCS_magnetometer_mode_enum_t magnetometer_selection_for_raw_magnetometer_telemetry, bool automatic_estimation_transition_due_to_rate_sensor_errors, bool wheel_30s_power_up_delay, uint8_t error_counter_reset_period_min) |
| Instruct the ADCS to execute the ADCS_Set_Estimation_Params command. | |
| uint8_t | ADCS_get_estimation_params (ADCS_estimation_params_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Estimation_Params command. | |
| uint8_t | ADCS_set_augmented_sgp4_params (double incl_coefficient, double raan_coefficient, double ecc_coefficient, double aop_coefficient, double time_coefficient, double pos_coefficient, double maximum_position_error, ADCS_augmented_sgp4_filter_enum_t augmented_sgp4_filter, double xp_coefficient, double yp_coefficient, uint8_t gps_roll_over, double position_sd, double velocity_sd, uint8_t min_satellites, double time_gain, double max_lag, uint16_t min_samples) |
| Set the Augmented SGP4 Parameters of the ADCS. | |
| uint8_t | ADCS_get_augmented_sgp4_params (ADCS_augmented_sgp4_params_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Augmented_SGP4_Params command. | |
| uint8_t | ADCS_set_tracking_controller_target_reference (float lon, float lat, float alt) |
| Instruct the ADCS to execute the ADCS_Set_Tracking_Controller_Target_Reference command. | |
| uint8_t | ADCS_get_tracking_controller_target_reference (ADCS_tracking_controller_target_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Tracking_Controller_Target_Reference command. | |
| uint8_t | ADCS_set_rate_gyro_config (ADCS_axis_select_enum_t gyro1, ADCS_axis_select_enum_t gyro2, ADCS_axis_select_enum_t gyro3, double x_rate_offset, double y_rate_offset, double z_rate_offset, uint8_t rate_sensor_mult) |
| Instruct the ADCS to execute the ADCS_Set_Rate_Gyro_Config command. | |
| uint8_t | ADCS_get_rate_gyro_config (ADCS_rate_gyro_config_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Get_Rate_Gyro_Config command. | |
| uint8_t | ADCS_get_estimated_attitude_angles (ADCS_estimated_attitude_angles_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Estimated_Attitude_Angles command. | |
| uint8_t | ADCS_get_magnetic_field_vector (ADCS_magnetic_field_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Magnetic_Field_Vector command. | |
| uint8_t | ADCS_get_fine_sun_vector (ADCS_fine_sun_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Fine_Sun_Vector command. | |
| uint8_t | ADCS_get_nadir_vector (ADCS_nadir_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Nadir_Vector command. | |
| uint8_t | ADCS_get_commanded_wheel_speed (ADCS_wheel_speed_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Commanded_Wheel_Speed command. | |
| uint8_t | ADCS_get_igrf_magnetic_field_vector (ADCS_magnetic_field_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_IGRF_Magnetic_Field_Vector command. | |
| uint8_t | ADCS_get_quaternion_error_vector (ADCS_quaternion_error_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Quaternion_Error_Vector command. | |
| uint8_t | ADCS_get_estimated_gyro_bias (ADCS_estimated_gyro_bias_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Estimated_Gyro_Bias command. | |
| uint8_t | ADCS_get_estimation_innovation_vector (ADCS_estimation_innovation_vector_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Estimation_Innovation_Vector command. | |
| uint8_t | ADCS_get_raw_cam1_sensor (ADCS_raw_cam_sensor_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Raw_Cam1_Sensor command. | |
| uint8_t | ADCS_get_raw_cam2_sensor (ADCS_raw_cam_sensor_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Raw_Cam2_Sensor command. | |
| uint8_t | ADCS_get_raw_coarse_sun_sensor_1_to_6 (ADCS_raw_coarse_sun_sensor_1_to_6_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Raw_Coarse_Sun_Sensor_1_to_6 command. | |
| uint8_t | ADCS_get_raw_coarse_sun_sensor_7_to_10 (ADCS_raw_coarse_sun_sensor_7_to_10_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Raw_Coarse_Sun_Sensor_7_to_10 command. | |
| uint8_t | ADCS_get_cubecontrol_current (ADCS_cubecontrol_current_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_CubeControl_Current command. | |
| uint8_t | ADCS_get_measurements (ADCS_measurements_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_Measurements command. | |
| uint8_t | ADCS_reset_file_list_read_pointer () |
| Instruct the ADCS to execute the ADCS_reset_file_list_read_pointer command. | |
| uint8_t | ADCS_advance_file_list_read_pointer () |
| Instruct the ADCS to execute the ADCS_advance_file_list_read_pointer command. | |
| uint8_t | ADCS_get_file_info_telemetry (ADCS_file_info_struct_t *output_struct) |
| Request file information telemetry from the ADCS. | |
| uint8_t | ADCS_load_file_download_block (ADCS_file_type_enum_t file_type, uint8_t counter, uint32_t offset, uint16_t block_length) |
| Instruct the ADCS to load a file download block into the download buffer. | |
| uint8_t | ADCS_get_download_block_ready_telemetry (ADCS_download_block_ready_struct_t *output_struct) |
| Request Download Block Ready telemetry from the ADCS. | |
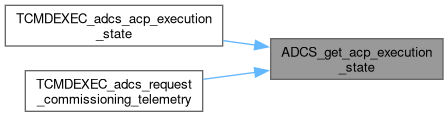
| uint8_t | ADCS_get_acp_execution_state (ADCS_acp_execution_state_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_execution_state command. | |
| uint8_t | ADCS_initiate_download_burst (bool ignore_hole_map) |
| Send the Initiate Download Burst command to the ADCS. | |
| uint8_t | ADCS_set_hole_map (uint8_t *hole_map, uint8_t which_map) |
| Send a File Upload Hole Map command to the ADCS. | |
| uint8_t | ADCS_get_hole_map (uint8_t *hole_map_struct, uint8_t which_map) |
| Retrieve a File Upload Hole Map telemetry from the ADCS. | |
| uint8_t | ADCS_format_sd () |
| Instruct the ADCS to format the SD card. | |
| uint8_t | ADCS_erase_file (ADCS_file_type_enum_t filetype, uint8_t filecounter, bool erase_all) |
| Send the Erase File command to the ADCS. | |
| uint8_t | ADCS_get_sd_card_format_erase_progress (ADCS_sd_card_format_erase_progress_struct_t *output_struct) |
| Retrieve the SD card format/erase progress telemetry from the ADCS. | |
| uint8_t | ADCS_get_file_download_buffer (ADCS_file_download_buffer_struct_t *output_struct) |
| Retrieve the File Download Buffer telemetry from the ADCS. | |
| uint8_t | ADCS_get_current_state_1 (ADCS_current_state_1_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_current_state_1 command. (There's an ADCS_current_state_2 command which is presently not implemented). | |
| uint8_t | ADCS_get_raw_star_tracker_data (ADCS_raw_star_tracker_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_raw_star_tracker_data command. | |
| uint8_t | ADCS_save_image_to_sd (ADCS_camera_select_enum_t camera_select, ADCS_image_size_enum_t image_size) |
| Instruct the ADCS to save an image to the SD card. | |
| uint8_t | ADCS_synchronize_unix_time () |
| Instruct the ADCS to synchronize its Unix epoch time to the current OBC Unix time. | |
| uint8_t | ADCS_get_current_unix_time (uint64_t *epoch_time_ms) |
| Instruct the ADCS to execute the ADCS_get_current_unix_time command. | |
| uint8_t | ADCS_set_sd_log_config (uint8_t which_log, const uint8_t **log_array, uint8_t log_array_len, uint16_t log_period, ADCS_sd_log_destination_enum_t which_sd) |
| Instruct the ADCS to execute the ADCS_set_sd_log_config command. | |
| uint8_t | ADCS_get_sd_log_config (uint8_t which_log, ADCS_sd_log_config_struct_t *config) |
| Instruct the ADCS to execute the ADCS_get_sd_log_config command. | |
| int16_t | ADCS_load_sd_file_block_to_filesystem (ADCS_file_info_struct_t file_info, uint8_t current_block, lfs_file_t *file) |
| Save one block of the ADCS SD card file pointed to by the file pointer into the ADCS download buffer, then append it to the file in LittleFS. | |
| uint8_t | ADCS_get_sd_card_file_list (uint16_t num_to_read, uint16_t index_offset) |
| Get the list of files from the SD card. | |
| int16_t | ADCS_save_sd_file_to_lfs_by_index (bool index_file_bool, uint16_t file_index, bool enable_checksum_validation_bool, uint16_t checksum) |
| Save a specified file from the ADCS SD card to the ADCS subfolder in LittleFS. | |
| int16_t | ADCS_save_sd_file_to_lfs_by_checksum (bool index_file_bool, uint16_t file_checksum) |
| Save a file, specified by its CRC16 checksum, from the ADCS SD card to the ADCS subfolder in LittleFS. | |
| uint8_t | ADCS_disable_SD_logging () |
| Disable all active ADCS SD card logs. | |
| uint8_t | ADCS_disable_peripherals_and_SD_logs_without_stabilisation () |
| Disable all ADCS peripherals and active SD card logs. | |
| uint8_t | ADCS_disable_peripherals_and_SD_logs_with_stabilisation () |
| Disable all ADCS peripherals and active SD card logs except the CubeSense Motor and Signal power, required for attitude stabilisation. | |
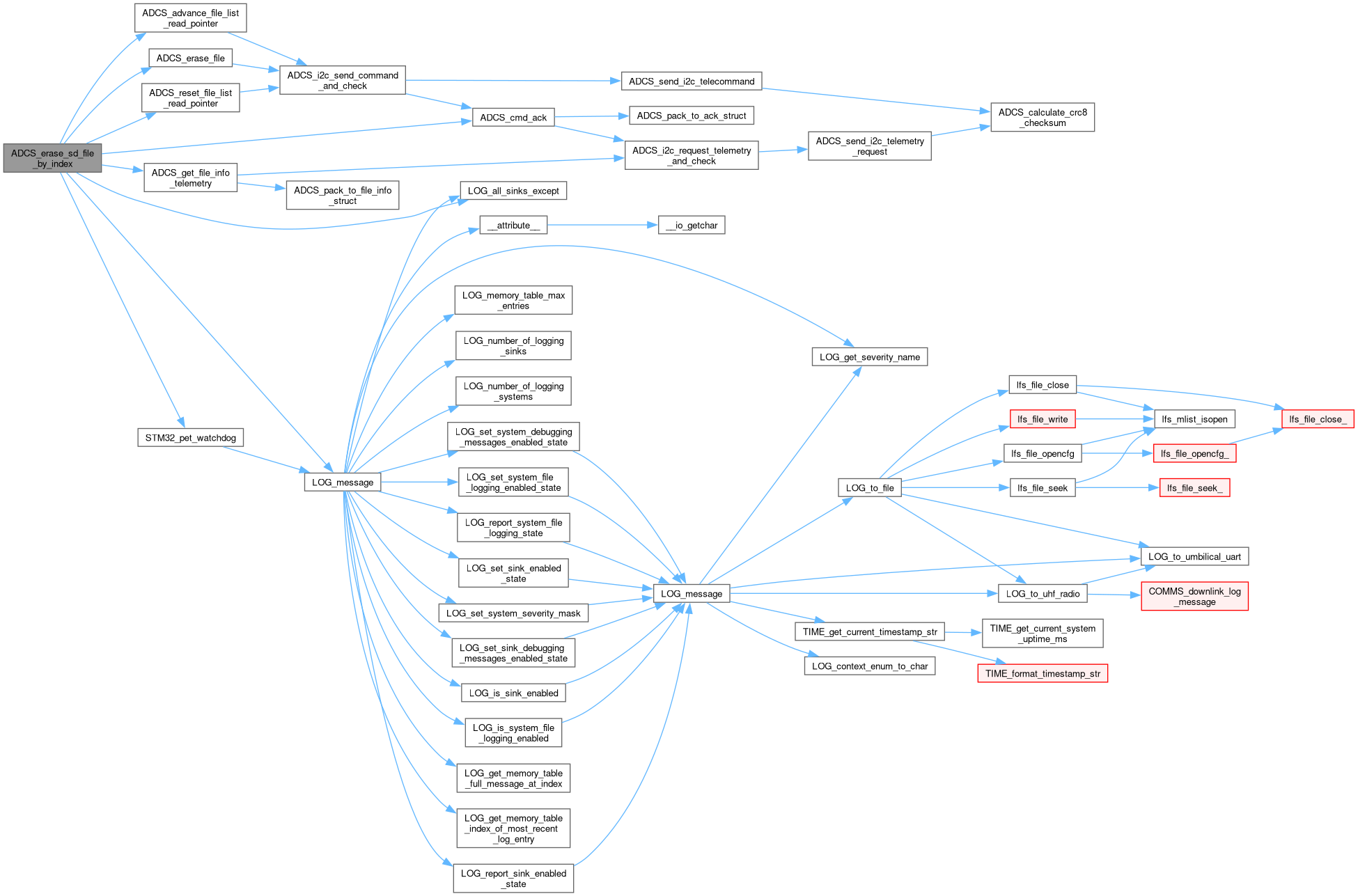
| uint8_t | ADCS_erase_sd_file_by_index (uint16_t file_index) |
| Given the index on the SD card of a file, erase that file. | |
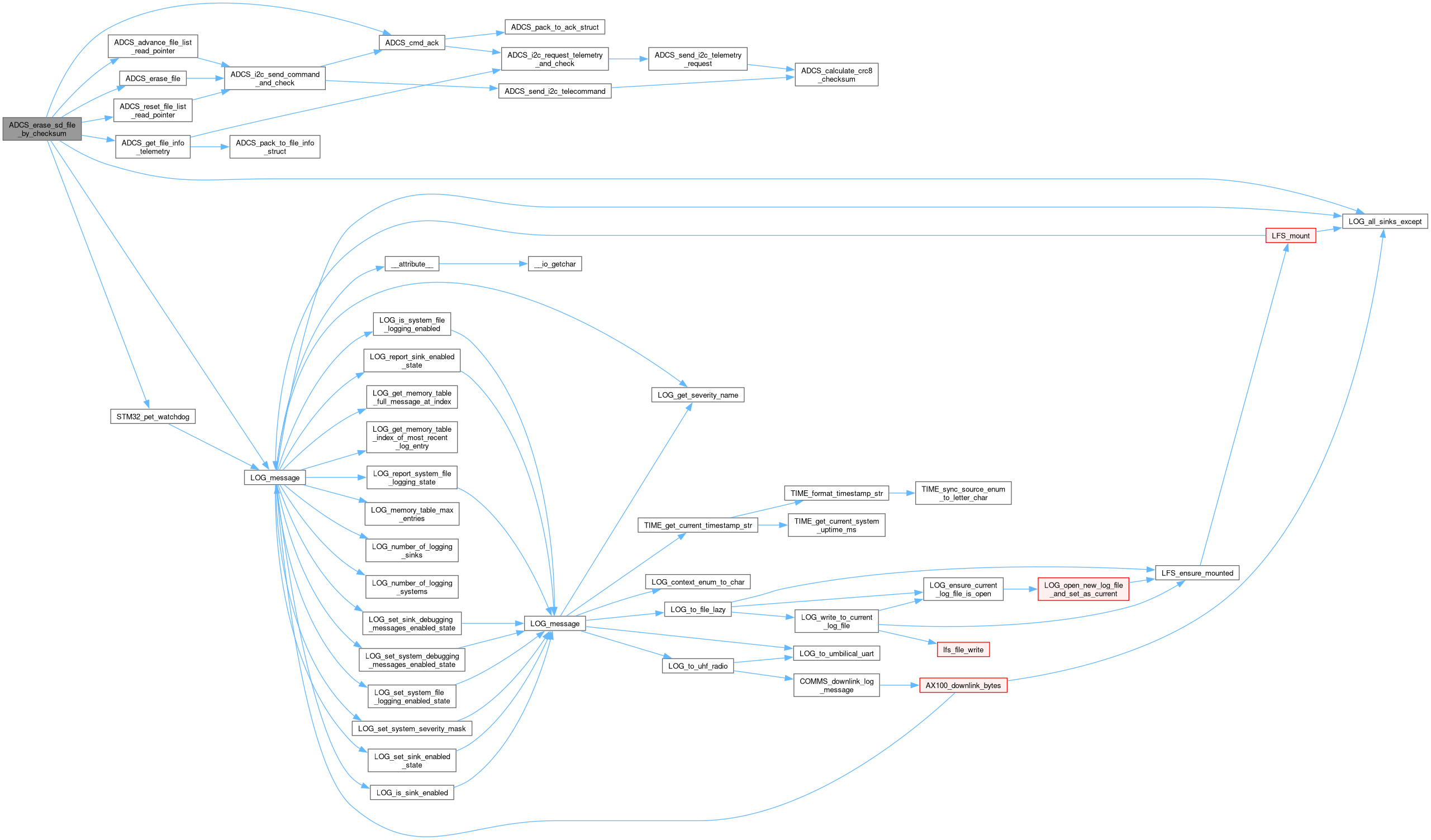
| uint8_t | ADCS_erase_sd_file_by_checksum (uint16_t file_checksum) |
| Given the checksum on the SD card of a file, erase that file. | |
| uint8_t | ADCS_bootloader_run_program () |
| Run the internal flash (CubeACP) program, exiting the bootloader. If CubeACP is already running, this function does nothing. | |
| uint8_t | ADCS_convert_to_jpg (uint8_t file_counter, uint8_t quality_factor, uint8_t white_balance) |
| Send the Convert to JPG command to the ADCS. | |
| uint8_t | ADCS_convert_sd_file_bmp_to_jpg_by_index (uint16_t file_index, uint8_t quality_factor, uint8_t white_balance) |
| Given the index on the SD card of a file, convert that file to a JPG image. | |
| uint8_t | ADCS_convert_sd_file_bmp_to_jpg_by_checksum (uint16_t file_checksum, uint8_t quality_factor, uint8_t white_balance) |
| Given the CRC16 checksum of a file on the SD card, convert that file to a JPG image. | |
| uint8_t | ADCS_get_wheel_currents (ADCS_wheel_currents_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_wheel_currents command. | |
| uint8_t | ADCS_get_cubesense_currents (ADCS_cubesense_currents_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_cubesense_currents command. | |
| uint8_t | ADCS_get_misc_currents (ADCS_misc_currents_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_misc_currents command. | |
| uint8_t | ADCS_get_jpg_conversion_progress (ADCS_conversion_progress_struct_t *output_struct) |
| Instruct the ADCS to execute the ADCS_get_jpg_conversion_progress command. | |
Variables | |
| uint8_t | adcs_download_buffer [20480] |
Function Documentation
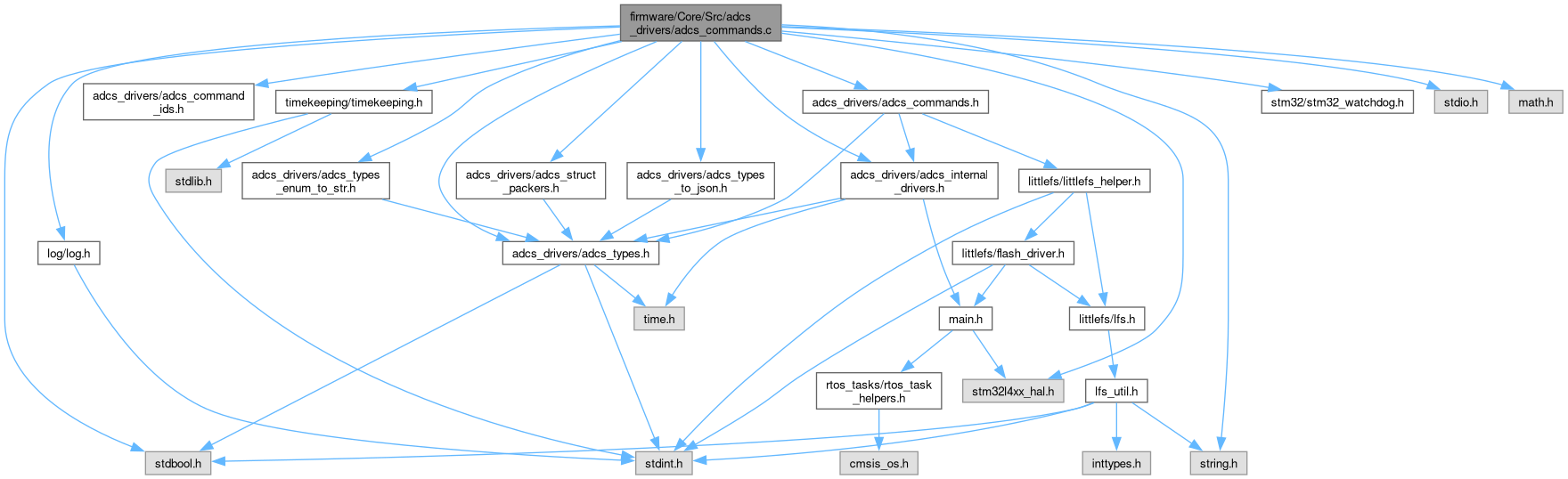
◆ ADCS_advance_file_list_read_pointer()
| uint8_t ADCS_advance_file_list_read_pointer | ( | ) |
Instruct the ADCS to execute the ADCS_advance_file_list_read_pointer command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
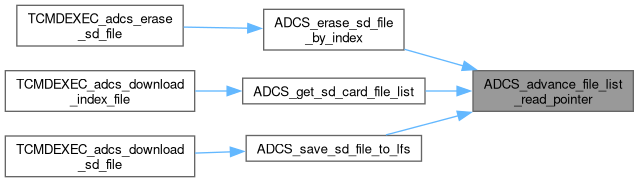
◆ ADCS_attitude_control_mode()
| uint8_t ADCS_attitude_control_mode | ( | ADCS_control_mode_enum_t | mode, |
| uint16_t | timeout ) |
Instruct the ADCS to execute the titular command.
- Parameters
-
mode Control mode to set (Table 77 in Firmware Manual) timeout Timeout to set control mode
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
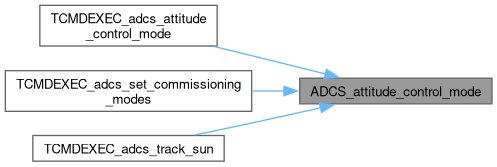
◆ ADCS_attitude_estimation_mode()
| uint8_t ADCS_attitude_estimation_mode | ( | ADCS_estimation_mode_enum_t | mode | ) |
Instruct the ADCS to execute the ADCS_Attitude_Estimation_Mode command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_bootloader_clear_errors()
| uint8_t ADCS_bootloader_clear_errors | ( | ) |
Instruct the ADCS to execute the ADCS_Bootloader_Clear_Errors command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the caller graph for this function:

◆ ADCS_bootloader_run_program()
| uint8_t ADCS_bootloader_run_program | ( | ) |
Run the internal flash (CubeACP) program, exiting the bootloader. If CubeACP is already running, this function does nothing.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
- Note
- This function always returns an error, because if the ADCS leaves the bootloader it can't confirm this command, which commands it to leave the bootloader
Here is the caller graph for this function:

◆ ADCS_clear_errors()
| uint8_t ADCS_clear_errors | ( | ) |
Instruct the ADCS to execute the ADCS_Clear_Errors command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_cmd_ack()
| uint8_t ADCS_cmd_ack | ( | ADCS_cmd_ack_struct_t * | ack | ) |
Instructs the ADCS to determine whether the last command succeeded. (Doesn't work for telemetry requests, by design.).
- Parameters
-
[out] ack Structure containing the formatted information about the last command sent.
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_convert_sd_file_bmp_to_jpg_by_checksum()
| uint8_t ADCS_convert_sd_file_bmp_to_jpg_by_checksum | ( | uint16_t | file_checksum, |
| uint8_t | quality_factor, | ||
| uint8_t | white_balance ) |
Given the CRC16 checksum of a file on the SD card, convert that file to a JPG image.
- Parameters
-
[in] file_checksum The checksum of the file. [in] quality_factor Amount of compression and data loss; 1 is the most, 100 is the least [in] white_balance White balance
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_convert_sd_file_bmp_to_jpg_by_index()
| uint8_t ADCS_convert_sd_file_bmp_to_jpg_by_index | ( | uint16_t | file_index, |
| uint8_t | quality_factor, | ||
| uint8_t | white_balance ) |
Given the index on the SD card of a file, convert that file to a JPG image.
- Parameters
-
[in] file_index The index of the file. [in] quality_factor Amount of compression and data loss; 1 is the most, 100 is the least [in] white_balance White balance
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_convert_to_jpg()
| uint8_t ADCS_convert_to_jpg | ( | uint8_t | file_counter, |
| uint8_t | quality_factor, | ||
| uint8_t | white_balance ) |
Send the Convert to JPG command to the ADCS.
- Parameters
-
[in] file_counter The counter of the file. [in] quality_factor Amount of compression and data loss; 1 is the most, 100 is the least [in] white_balance White balance
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_deploy_magnetometer()
| uint8_t ADCS_deploy_magnetometer | ( | uint8_t | deploy_timeout | ) |
Instruct the ADCS to execute the ADCS_Deploy_Magnetometer command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_disable_peripherals_and_SD_logs_with_stabilisation()
| uint8_t ADCS_disable_peripherals_and_SD_logs_with_stabilisation | ( | ) |
Disable all ADCS peripherals and active SD card logs except the CubeSense Motor and Signal power, required for attitude stabilisation.
- Note
- If CubeSense Motor and/or Signal Power are already off, they will remain off.
- Compared to without_stabilisation, this costs average 250 mW, maximum 1 W extra.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_disable_peripherals_and_SD_logs_without_stabilisation()
| uint8_t ADCS_disable_peripherals_and_SD_logs_without_stabilisation | ( | ) |
Disable all ADCS peripherals and active SD card logs.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_disable_SD_logging()
| uint8_t ADCS_disable_SD_logging | ( | ) |
Disable all active ADCS SD card logs.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_erase_file()
| uint8_t ADCS_erase_file | ( | ADCS_file_type_enum_t | filetype, |
| uint8_t | filecounter, | ||
| bool | erase_all ) |
Send the Erase File command to the ADCS.
- Parameters
-
[in] erase_file_command Pointer to a struct containing the file type, file counter, and erase all flag.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_erase_sd_file_by_checksum()
| uint8_t ADCS_erase_sd_file_by_checksum | ( | uint16_t | file_checksum | ) |
Given the checksum on the SD card of a file, erase that file.
- Parameters
-
[in] file_checksum The checksum of the file.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_erase_sd_file_by_index()
| uint8_t ADCS_erase_sd_file_by_index | ( | uint16_t | file_index | ) |
Given the index on the SD card of a file, erase that file.
- Parameters
-
[in] file_index The index of the file.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_format_sd()
| uint8_t ADCS_format_sd | ( | ) |
Instruct the ADCS to format the SD card.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_acp_execution_state()
| uint8_t ADCS_get_acp_execution_state | ( | ADCS_acp_execution_state_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_execution_state command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_augmented_sgp4_params()
| uint8_t ADCS_get_augmented_sgp4_params | ( | ADCS_augmented_sgp4_params_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Augmented_SGP4_Params command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_commanded_attitude_angles()
| uint8_t ADCS_get_commanded_attitude_angles | ( | ADCS_commanded_angles_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Commanded_Attitude_Angles command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_commanded_wheel_speed()
| uint8_t ADCS_get_commanded_wheel_speed | ( | ADCS_wheel_speed_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Commanded_Wheel_Speed command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_communication_status()
| uint8_t ADCS_get_communication_status | ( | ADCS_comms_status_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Communication_Status command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_cubecontrol_current()
| uint8_t ADCS_get_cubecontrol_current | ( | ADCS_cubecontrol_current_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_CubeControl_Current command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_cubesense_currents()
| uint8_t ADCS_get_cubesense_currents | ( | ADCS_cubesense_currents_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_cubesense_currents command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_current_state_1()
| uint8_t ADCS_get_current_state_1 | ( | ADCS_current_state_1_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_current_state_1 command. (There's an ADCS_current_state_2 command which is presently not implemented).
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_current_unix_time()
| uint8_t ADCS_get_current_unix_time | ( | uint64_t * | epoch_time_ms | ) |
Instruct the ADCS to execute the ADCS_get_current_unix_time command.
- Parameters
-
epoch_time_ms Pointer to uint64 to store the time since the Unix epoch in ms, according to the ADCS
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_download_block_ready_telemetry()
| uint8_t ADCS_get_download_block_ready_telemetry | ( | ADCS_download_block_ready_struct_t * | output_struct | ) |
Request Download Block Ready telemetry from the ADCS.
- Parameters
-
[out] output_struct Pointer to the struct to populate with telemetry data.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimate_angular_rates()
| uint8_t ADCS_get_estimate_angular_rates | ( | ADCS_angular_rates_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Estimate_Angular_Rates command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimate_fine_angular_rates()
| uint8_t ADCS_get_estimate_fine_angular_rates | ( | ADCS_fine_angular_rates_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Estimate_Fine_Angular_Rates command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimated_attitude_angles()
| uint8_t ADCS_get_estimated_attitude_angles | ( | ADCS_estimated_attitude_angles_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Estimated_Attitude_Angles command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimated_gyro_bias()
| uint8_t ADCS_get_estimated_gyro_bias | ( | ADCS_estimated_gyro_bias_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Estimated_Gyro_Bias command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimation_innovation_vector()
| uint8_t ADCS_get_estimation_innovation_vector | ( | ADCS_estimation_innovation_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Estimation_Innovation_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_estimation_params()
| uint8_t ADCS_get_estimation_params | ( | ADCS_estimation_params_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Estimation_Params command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_file_download_buffer()
| uint8_t ADCS_get_file_download_buffer | ( | ADCS_file_download_buffer_struct_t * | output_struct | ) |
Retrieve the File Download Buffer telemetry from the ADCS.
- Parameters
-
[out] output_struct Pointer to the struct where the telemetry data will be stored.
- Returns
- 0 if successful, non-zero if an error occurred in transmission or processing.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_file_info_telemetry()
| uint8_t ADCS_get_file_info_telemetry | ( | ADCS_file_info_struct_t * | output_struct | ) |
Request file information telemetry from the ADCS.
- Parameters
-
[out] output_struct Pointer to the struct to store parsed telemetry data.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_fine_sun_vector()
| uint8_t ADCS_get_fine_sun_vector | ( | ADCS_fine_sun_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Fine_Sun_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_hole_map()
| uint8_t ADCS_get_hole_map | ( | uint8_t * | hole_map_struct, |
| uint8_t | which_map ) |
Retrieve a File Upload Hole Map telemetry from the ADCS.
- Parameters
-
[out] hole_map_struct Pointer to an array of uint8 to store the retrieved hole map. [in] which_map Number between 1 and 8 to choose the hole map to upload.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

◆ ADCS_get_identification()
| uint8_t ADCS_get_identification | ( | ADCS_id_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Identification command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_igrf_magnetic_field_vector()
| uint8_t ADCS_get_igrf_magnetic_field_vector | ( | ADCS_magnetic_field_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_IGRF_Magnetic_Field_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_jpg_conversion_progress()
| uint8_t ADCS_get_jpg_conversion_progress | ( | ADCS_conversion_progress_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_jpg_conversion_progress command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_get_llh_position()
| uint8_t ADCS_get_llh_position | ( | ADCS_llh_position_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_LLH_Position command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_magnetic_field_vector()
| uint8_t ADCS_get_magnetic_field_vector | ( | ADCS_magnetic_field_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Magnetic_Field_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_magnetometer_config()
| uint8_t ADCS_get_magnetometer_config | ( | ADCS_magnetometer_config_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Magnetometer_Config command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_magnetorquer_command()
| uint8_t ADCS_get_magnetorquer_command | ( | ADCS_magnetorquer_command_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Magnetorquer_Command command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_measurements()
| uint8_t ADCS_get_measurements | ( | ADCS_measurements_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Measurements command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_misc_currents()
| uint8_t ADCS_get_misc_currents | ( | ADCS_misc_currents_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_misc_currents command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_nadir_vector()
| uint8_t ADCS_get_nadir_vector | ( | ADCS_nadir_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Nadir_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_power_control()
| uint8_t ADCS_get_power_control | ( | ADCS_power_control_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Power_Control command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_program_status()
| uint8_t ADCS_get_program_status | ( | ADCS_boot_running_status_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Program_Status command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_quaternion_error_vector()
| uint8_t ADCS_get_quaternion_error_vector | ( | ADCS_quaternion_error_vector_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Quaternion_Error_Vector command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_rate_gyro_config()
| uint8_t ADCS_get_rate_gyro_config | ( | ADCS_rate_gyro_config_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Rate_Gyro_Config command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_rate_sensor_rates()
| uint8_t ADCS_get_rate_sensor_rates | ( | ADCS_rated_sensor_rates_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Rate_Sensor_Rates command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_cam1_sensor()
| uint8_t ADCS_get_raw_cam1_sensor | ( | ADCS_raw_cam_sensor_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Raw_Cam1_Sensor command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_cam2_sensor()
| uint8_t ADCS_get_raw_cam2_sensor | ( | ADCS_raw_cam_sensor_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Raw_Cam2_Sensor command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_coarse_sun_sensor_1_to_6()
| uint8_t ADCS_get_raw_coarse_sun_sensor_1_to_6 | ( | ADCS_raw_coarse_sun_sensor_1_to_6_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Raw_Coarse_Sun_Sensor_1_to_6 command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_coarse_sun_sensor_7_to_10()
| uint8_t ADCS_get_raw_coarse_sun_sensor_7_to_10 | ( | ADCS_raw_coarse_sun_sensor_7_to_10_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Raw_Coarse_Sun_Sensor_7_to_10 command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_magnetometer_values()
| uint8_t ADCS_get_raw_magnetometer_values | ( | ADCS_raw_magnetometer_values_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Raw_Magnetometer_Values command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_raw_star_tracker_data()
| uint8_t ADCS_get_raw_star_tracker_data | ( | ADCS_raw_star_tracker_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_raw_star_tracker_data command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

◆ ADCS_get_sd_card_file_list()
| uint8_t ADCS_get_sd_card_file_list | ( | uint16_t | num_to_read, |
| uint16_t | index_offset ) |
Get the list of files from the SD card.
- Parameters
-
[in] num_to_read The maximum number of file entries to read. [in] index_offset The index (starting at 0) from which to start reading files.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission, negative if an LFS or snprintf error code occurred.
Here is the call graph for this function:
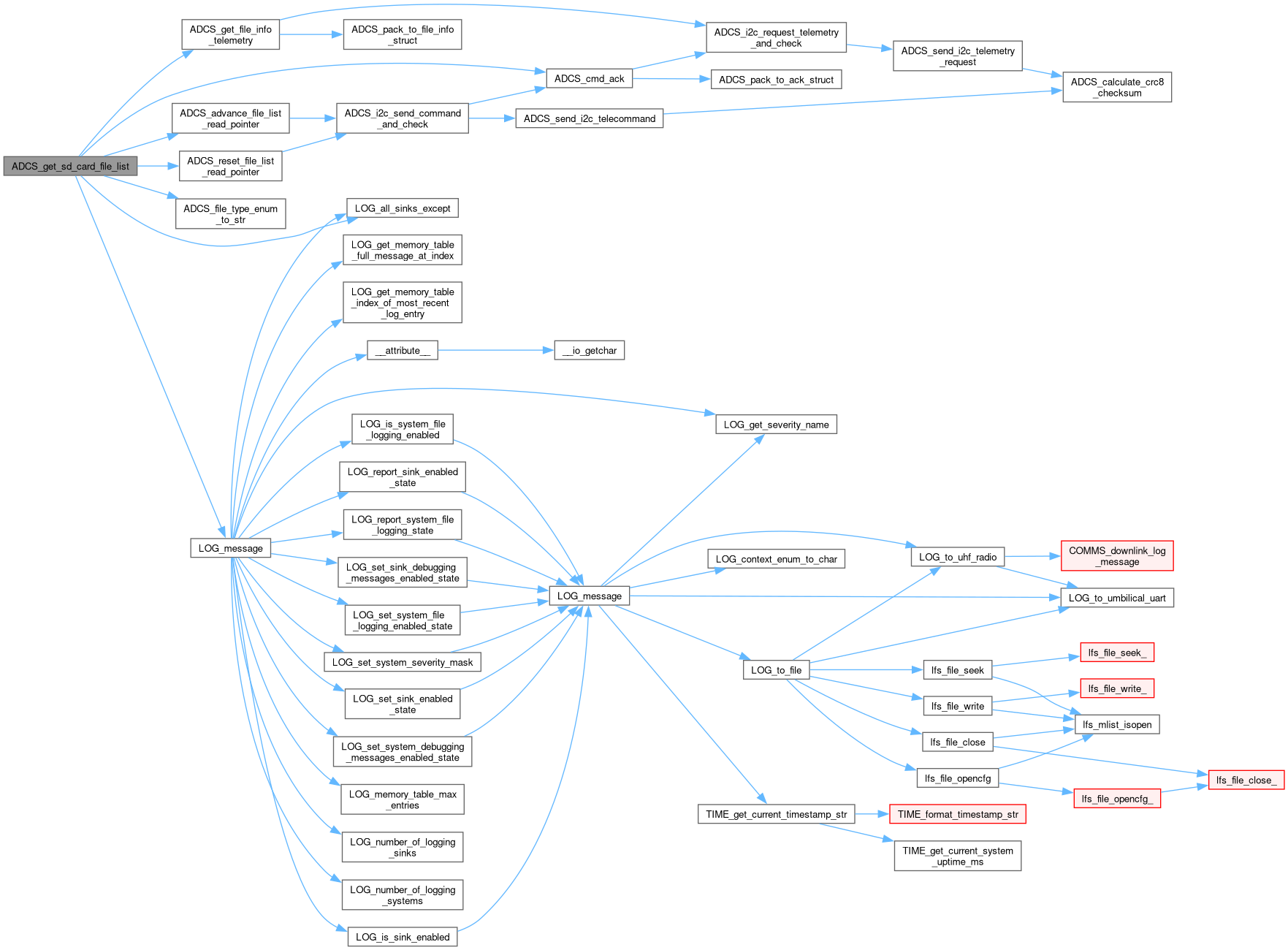
Here is the caller graph for this function:

◆ ADCS_get_sd_card_format_erase_progress()
| uint8_t ADCS_get_sd_card_format_erase_progress | ( | ADCS_sd_card_format_erase_progress_struct_t * | output_struct | ) |
Retrieve the SD card format/erase progress telemetry from the ADCS.
- Parameters
-
[out] output_struct Pointer to the struct where the telemetry data will be stored.
- Returns
- 0 if successful, non-zero if an error occurred in transmission or processing.
Here is the call graph for this function:

◆ ADCS_get_sd_log_config()
| uint8_t ADCS_get_sd_log_config | ( | uint8_t | which_log, |
| ADCS_sd_log_config_struct_t * | config ) |
Instruct the ADCS to execute the ADCS_get_sd_log_config command.
- Parameters
-
[in] config Pointer to struct to store the config data [in] which_log 1 or 2; which specific log number to log to the SD card
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_sgp4_orbit_params()
| uint8_t ADCS_get_sgp4_orbit_params | ( | ADCS_orbit_params_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_SGP4_Orbit_Params command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_tracking_controller_target_reference()
| uint8_t ADCS_get_tracking_controller_target_reference | ( | ADCS_tracking_controller_target_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Tracking_Controller_Target_Reference command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_unix_time_save_mode()
| uint8_t ADCS_get_unix_time_save_mode | ( | ADCS_set_unix_time_save_mode_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Unix_Time_Save_Mode command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_wheel_currents()
| uint8_t ADCS_get_wheel_currents | ( | ADCS_wheel_currents_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_get_wheel_currents command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_get_wheel_speed()
| uint8_t ADCS_get_wheel_speed | ( | ADCS_wheel_speed_struct_t * | output_struct | ) |
Instruct the ADCS to execute the ADCS_Get_Wheel_Speed command.
- Parameters
-
output_struct Pointer to struct in which to place packed ADCS telemetry data
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

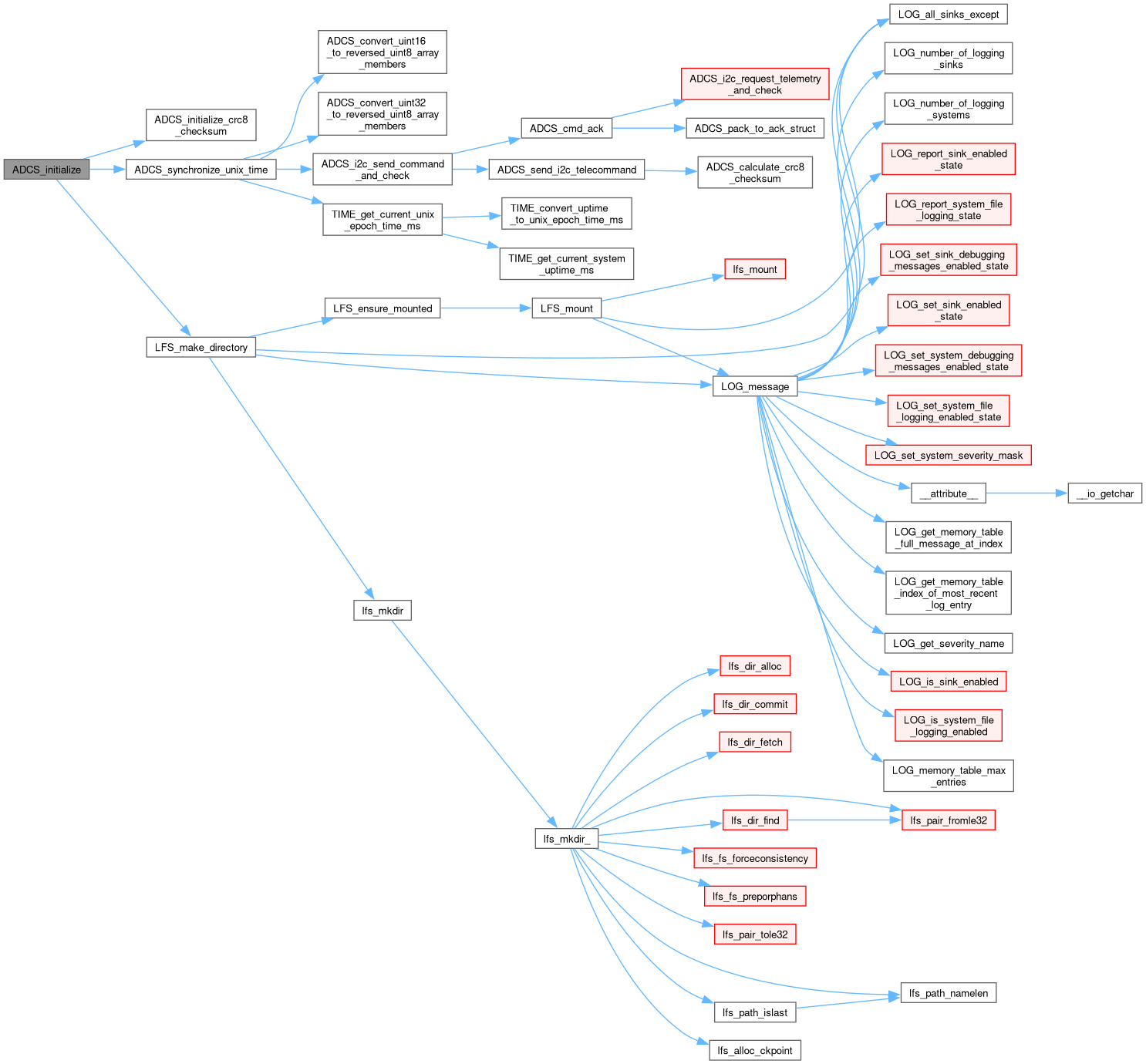
◆ ADCS_initialize()
| uint8_t ADCS_initialize | ( | ) |
Initialize the ADCS CRC, timestamp, and file system directory.
- Returns
- 0 when successful
- Note
- LittleFS must be mounted, power must be provided to the ADCS, and OBC time must be set in order to initialize the ADCS.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_initiate_download_burst()
| uint8_t ADCS_initiate_download_burst | ( | bool | ignore_hole_map | ) |
Send the Initiate Download Burst command to the ADCS.
- Parameters
-
[in] ignore_hole_map Boolean flag to ignore the hole map.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_load_file_download_block()
| uint8_t ADCS_load_file_download_block | ( | ADCS_file_type_enum_t | file_type, |
| uint8_t | counter, | ||
| uint32_t | offset, | ||
| uint16_t | block_length ) |
Instruct the ADCS to load a file download block into the download buffer.
- Parameters
-
[in] file_type File type to load (e.g., telemetry log, JPG, etc.). [in] counter Counter value for file block. [in] offset Offset in the file from which to start downloading. [in] block_length Number of packets to send.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

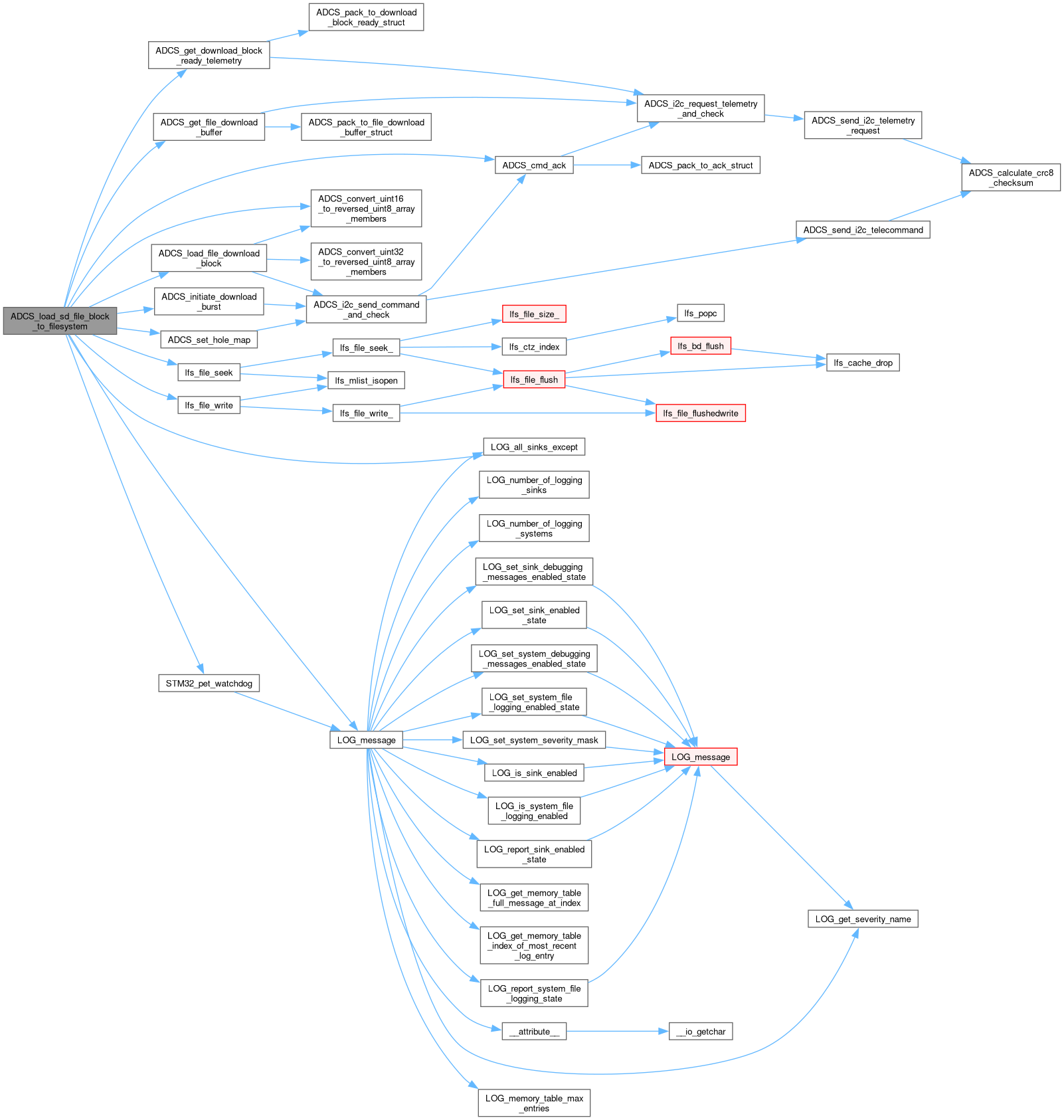
◆ ADCS_load_sd_file_block_to_filesystem()
| int16_t ADCS_load_sd_file_block_to_filesystem | ( | ADCS_file_info_struct_t | file_info, |
| uint8_t | current_block, | ||
| lfs_file_t * | file ) |
Save one block of the ADCS SD card file pointed to by the file pointer into the ADCS download buffer, then append it to the file in LittleFS.
- Parameters
-
[in] file_info A struct containing information about the currently-pointed-to file [in] current_block The block to load into the download buffer [in] file Pointer to LittleFS file to store everything to
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission. Specifically: bytes 0-2 are the ADCS error, bytes 3-10 are which command failed, bytes 11-16 are the index of the failure if applicable
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_reset()
| uint8_t ADCS_reset | ( | ) |
Instruct the ADCS to execute the ADCS_Reset command.
- Returns
- 0 if successful, non-zero if a HAL error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

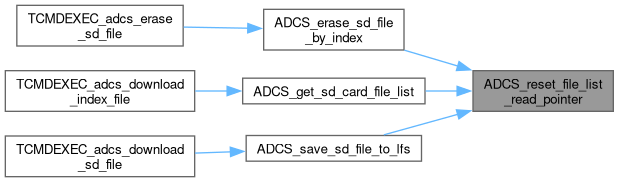
◆ ADCS_reset_file_list_read_pointer()
| uint8_t ADCS_reset_file_list_read_pointer | ( | ) |
Instruct the ADCS to execute the ADCS_reset_file_list_read_pointer command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_run_once()
| uint8_t ADCS_run_once | ( | ) |
Instruct the ADCS to execute the ADCS_Run_Once command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_save_config()
| uint8_t ADCS_save_config | ( | ) |
Instruct the ADCS to execute the ADCS_Save_Config command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_save_image_to_sd()
| uint8_t ADCS_save_image_to_sd | ( | ADCS_camera_select_enum_t | camera_select, |
| ADCS_image_size_enum_t | image_size ) |
Instruct the ADCS to save an image to the SD card.
- Parameters
-
[in] camera_select (int) Which camera to save the image from; can be Camera 1 (0) [sun], Camera 2 (1) [nadir, boom-side], or Star (2) [not on CTS-SAT-1] [in] image_size (int) Resolution of the image to save; can be 1024x1024 (0), 512x512 (1), 256x256 (2), 128x128 (3), or 64x64 (4)
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_save_orbit_params()
| uint8_t ADCS_save_orbit_params | ( | ) |
Instruct the ADCS to execute the ADCS_Save_Orbit_Params command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

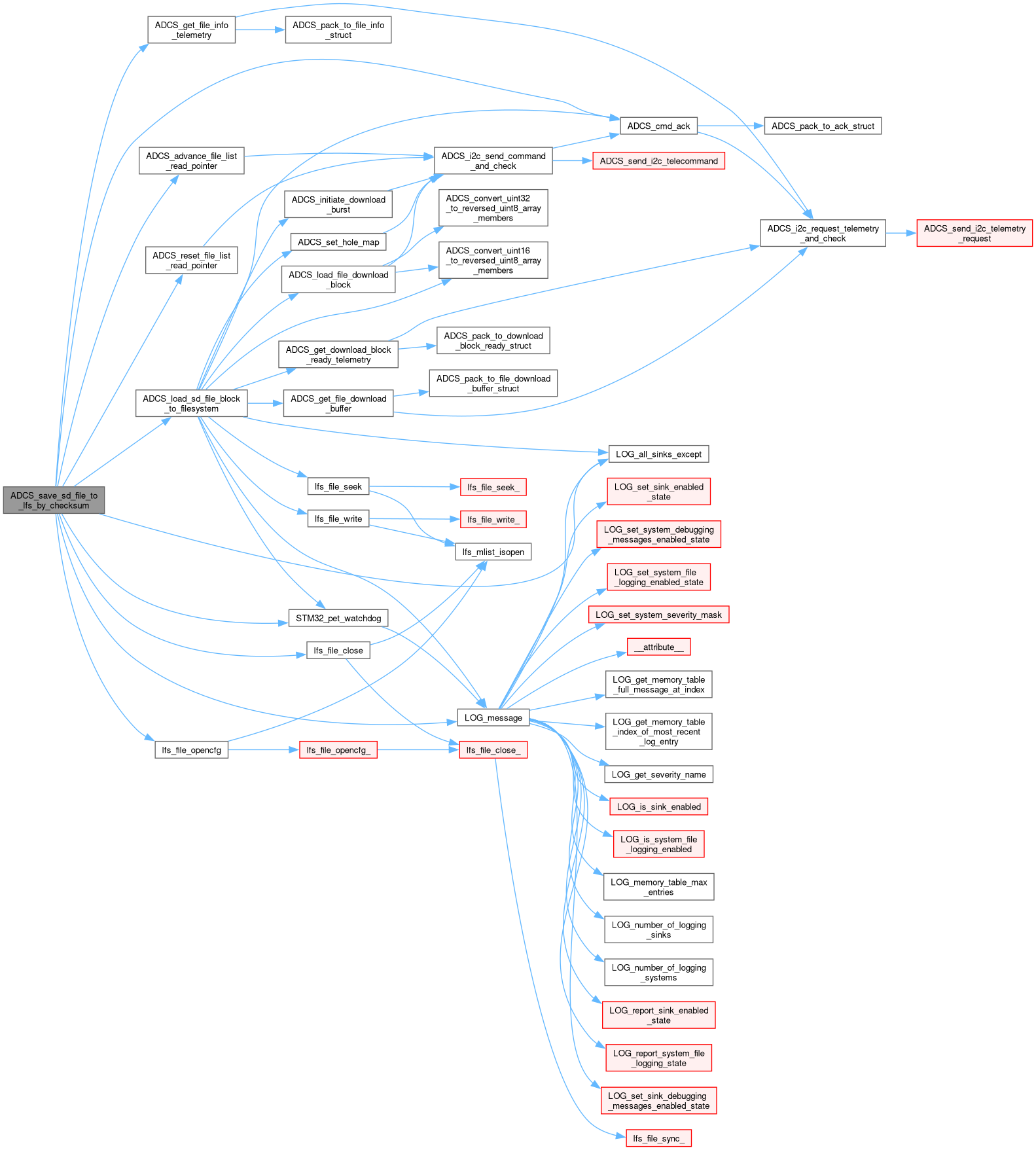
◆ ADCS_save_sd_file_to_lfs_by_checksum()
| int16_t ADCS_save_sd_file_to_lfs_by_checksum | ( | bool | index_file_bool, |
| uint16_t | file_checksum ) |
Save a file, specified by its CRC16 checksum, from the ADCS SD card to the ADCS subfolder in LittleFS.
- Parameters
-
[in] index_file_bool Whether this is the index file or not [in] file_checksum CRC16 checksum of the file in the SD card; only used if index_file_bool is false
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission, negative if an LFS or snprintf error code occurred. Specifically, assuming no HAL or LFS error: bytes 0-2 are the ADCS error, bytes 3-10 are which command failed, bytes 11-16 are the index of the failure if applicable
Here is the call graph for this function:
Here is the caller graph for this function:

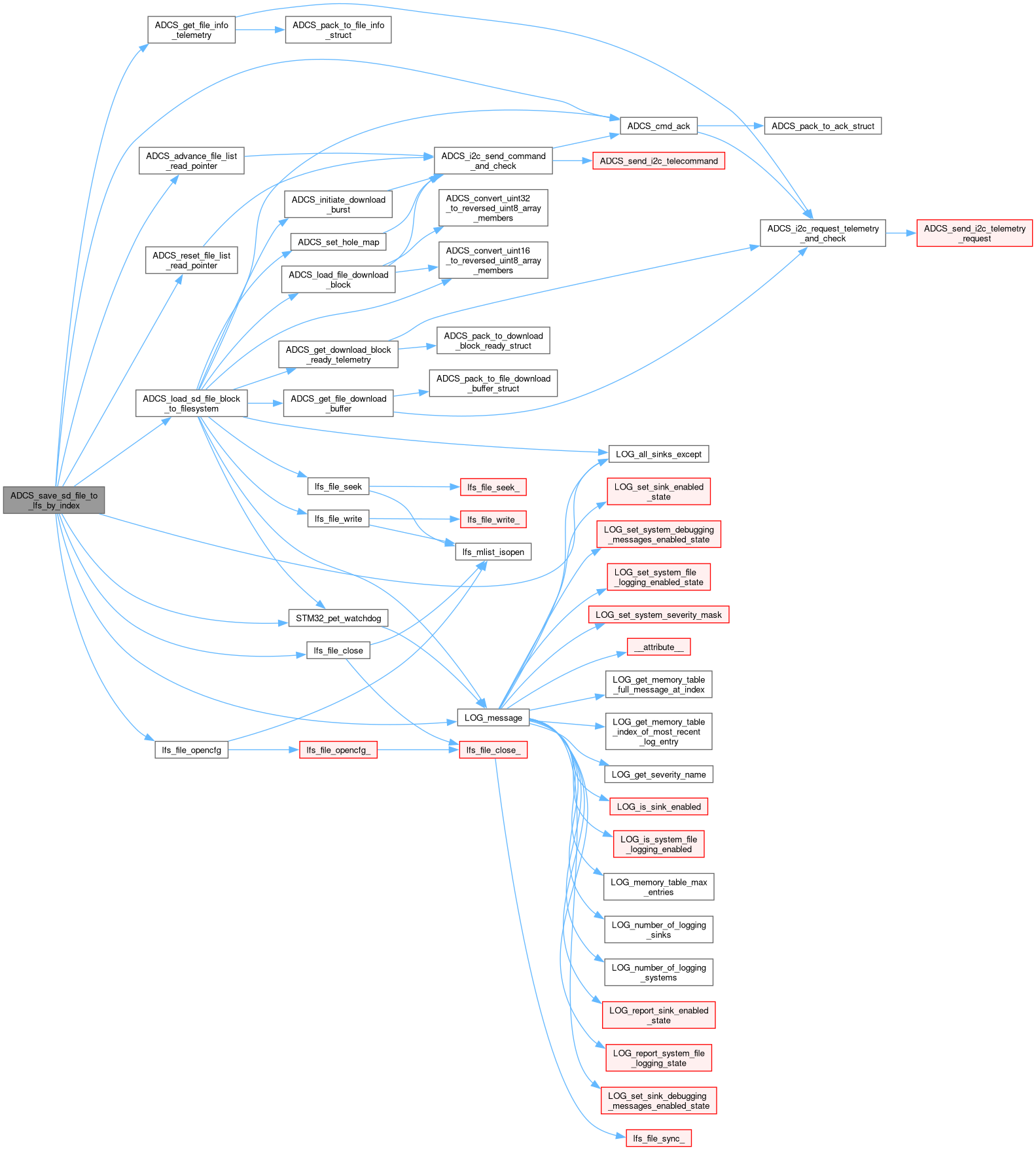
◆ ADCS_save_sd_file_to_lfs_by_index()
| int16_t ADCS_save_sd_file_to_lfs_by_index | ( | bool | index_file_bool, |
| uint16_t | file_index, | ||
| bool | enable_checksum_validation_bool, | ||
| uint16_t | checksum ) |
Save a specified file from the ADCS SD card to the ADCS subfolder in LittleFS.
- Parameters
-
[in] index_file_bool Whether this is the index file or not [in] file_index Index of the file in the SD card; only used if index_file_bool is false [in] enable_checksum_validation_bool Whether to check the checksum or not [in] checksum CRC16 checksum of the file
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission, negative if an LFS or snprintf error code occurred. Specifically, assuming no HAL or LFS error: bytes 0-2 are the ADCS error, bytes 3-10 are which command failed, bytes 11-16 are the index of the failure if applicable
Here is the call graph for this function:
Here is the caller graph for this function:

◆ ADCS_set_augmented_sgp4_params()
| uint8_t ADCS_set_augmented_sgp4_params | ( | double | incl_coefficient, |
| double | raan_coefficient, | ||
| double | ecc_coefficient, | ||
| double | aop_coefficient, | ||
| double | time_coefficient, | ||
| double | pos_coefficient, | ||
| double | maximum_position_error, | ||
| ADCS_augmented_sgp4_filter_enum_t | augmented_sgp4_filter, | ||
| double | xp_coefficient, | ||
| double | yp_coefficient, | ||
| uint8_t | gps_roll_over, | ||
| double | position_sd, | ||
| double | velocity_sd, | ||
| uint8_t | min_satellites, | ||
| double | time_gain, | ||
| double | max_lag, | ||
| uint16_t | min_samples ) |
Set the Augmented SGP4 Parameters of the ADCS.
- Parameters
-
[in] incl_coefficient Set inclination filter coefficient [in] raan_coefficient Set RAAN filter coefficient [in] ecc_coefficient Set eccentricity filter coefficient [in] aop_coefficient Set argument of perigee filter coefficient [in] time_coefficient Set time filter coefficient [in] pos_coefficient Set position filter coefficient [in] maximum_position_error Maximum position error for Augmented_SGP4 to continue working [in] augmented_sgp4_filter The type of filter being used (enum) [in] xp_coefficient Polar coefficient xp
[in] yp_coefficient Polar coefficient yp [in] gps_roll_over GPS roll over number [in] position_sd Maximum position standard deviation for Augmented_SGP4 to continue working [in] velocity_sd Maximum velocity standard deviation for Augmented_SGP4 to continue working [in] min_satellites Minimum satellites required for Augmented_SGP4 to continue working [in] time_gain Time offset compensation gain [in] max_lag Maximum lagged timestamp measurements to incorporate [in] min_samples Minimum samples to use to get Augmented_SGP4
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_commanded_attitude_angles()
| uint8_t ADCS_set_commanded_attitude_angles | ( | double | x, |
| double | y, | ||
| double | z ) |
Instruct the ADCS to execute the ADCS_Set_Commanded_Attitude_Angles command.
- Parameters
-
[in] x x attitude angle [in] y y attitude angle [in] z z attitude angle
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_estimation_params()
| uint8_t ADCS_set_estimation_params | ( | float | magnetometer_rate_filter_system_noise, |
| float | extended_kalman_filter_system_noise, | ||
| float | coarse_sun_sensor_measurement_noise, | ||
| float | sun_sensor_measurement_noise, | ||
| float | nadir_sensor_measurement_noise, | ||
| float | magnetometer_measurement_noise, | ||
| float | star_tracker_measurement_noise, | ||
| bool | use_sun_sensor, | ||
| bool | use_nadir_sensor, | ||
| bool | use_css, | ||
| bool | use_star_tracker, | ||
| bool | nadir_sensor_terminator_test, | ||
| bool | automatic_magnetometer_recovery, | ||
| ADCS_magnetometer_mode_enum_t | magnetometer_mode, | ||
| ADCS_magnetometer_mode_enum_t | magnetometer_selection_for_raw_magnetometer_telemetry, | ||
| bool | automatic_estimation_transition_due_to_rate_sensor_errors, | ||
| bool | wheel_30s_power_up_delay, | ||
| uint8_t | error_counter_reset_period_min ) |
Instruct the ADCS to execute the ADCS_Set_Estimation_Params command.
- Parameters
-
[in] magnetometer_rate_filter_system_noise Magnetometer rate filter system noise parameter [in] extended_kalman_filter_system_noise EKS system noise parameter [in] coarse_sun_sensor_measurement_noise CSS measurement noise parameter [in] sun_sensor_measurement_noise sun sensor measurement noise parameter [in] nadir_sensor_measurement_noise nadir sensor measurement noise parameter [in] magnetometer_measurement_noise magnetometer measurement noise parameter [in] star_tracker_measurement_noise star tracker measurement noise parameter [in] use_sun_sensor whether or not to use the sun sensor measurement in extended kalman filter [in] use_nadir_sensor whether or not to use the nadir sensor measurement in extended kalman filter [in] use_css whether or not to use the CSS measurement in extended kalman filter [in] use_star_tracker whether or not to use the star tracker measurement in extended kalman filter [in] nadir_sensor_terminator_test select to ignore nadir sensor measurements when terminator is in FOV [in] automatic_magnetometer_recovery select whether automatic switch to redundant magnetometer should occur in case of failure [in] magnetometer_mode select magnetometer mode for estimation and control [in] magnetometer_selection_for_raw_magnetometer_telemetry select magnetometer mode for the second raw telemetry frame [in] automatic_estimation_transition_due_to_rate_sensor_errors enable/disable automatic transition from MEMS rate estimation mode to RKF in case of rate sensor error [in] wheel_30s_power_up_delay present in CubeSupport but not in the manual – need to test [in] error_counter_reset_period_min reset period for error counter
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_hole_map()
| uint8_t ADCS_set_hole_map | ( | uint8_t * | hole_map, |
| uint8_t | which_map ) |
Send a File Upload Hole Map command to the ADCS.
- Parameters
-
[in] hole_map Pointer to a 16-byte array representing the hole map. [in] which_map Number between 1 and 8 to choose the hole map to upload.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_magnetometer_config()
| uint8_t ADCS_set_magnetometer_config | ( | double | mounting_transform_alpha_angle, |
| double | mounting_transform_beta_angle, | ||
| double | mounting_transform_gamma_angle, | ||
| double | channel_1_offset, | ||
| double | channel_2_offset, | ||
| double | channel_3_offset, | ||
| double | sensitivity_matrix_s11, | ||
| double | sensitivity_matrix_s22, | ||
| double | sensitivity_matrix_s33, | ||
| double | sensitivity_matrix_s12, | ||
| double | sensitivity_matrix_s13, | ||
| double | sensitivity_matrix_s21, | ||
| double | sensitivity_matrix_s23, | ||
| double | sensitivity_matrix_s31, | ||
| double | sensitivity_matrix_s32 ) |
Instruct the ADCS to set the magnetometer configuration.
- Parameters
-
mounting_transform_alpha_angle Mounting transform alpha angle [deg] mounting_transform_beta_angle Mounting transform beta angle [deg] mounting_transform_gamma_angle Mounting transform gamma angle [deg] channel_1_offset Channel 1 offset value channel_2_offset Channel 2 offset value channel_3_offset Channel 3 offset value sensitivity_matrix_s11 Value (1, 1) of the magnetometer sensitivity matrix sensitivity_matrix_s22 Value (2, 2) of the magnetometer sensitivity matrix sensitivity_matrix_s33 Value (3, 3) of the magnetometer sensitivity matrix sensitivity_matrix_s12 Value (1, 2) of the magnetometer sensitivity matrix sensitivity_matrix_s13 Value (1, 3) of the magnetometer sensitivity matrix sensitivity_matrix_s21 Value (2, 1) of the magnetometer sensitivity matrix sensitivity_matrix_s23 Value (2, 3) of the magnetometer sensitivity matrix sensitivity_matrix_s31 Value (3, 1) of the magnetometer sensitivity matrix sensitivity_matrix_s32 Value (3, 2) of the magnetometer sensitivity matrix
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_magnetometer_mode()
| uint8_t ADCS_set_magnetometer_mode | ( | ADCS_magnetometer_mode_enum_t | mode | ) |
Instruct the ADCS to execute the titular command.
- Parameters
-
mode Mode to set (Table 89 in Firmware Manual)
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_magnetorquer_output()
| uint8_t ADCS_set_magnetorquer_output | ( | double | x_duty, |
| double | y_duty, | ||
| double | z_duty ) |
Instruct the ADCS to execute the ADCS_Set_Magnetorquer_Output command.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

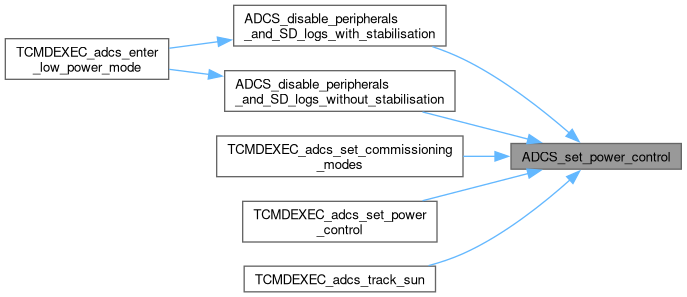
◆ ADCS_set_power_control()
| uint8_t ADCS_set_power_control | ( | ADCS_power_select_enum_t | cube_control_signal, |
| ADCS_power_select_enum_t | cube_control_motor, | ||
| ADCS_power_select_enum_t | cube_sense1, | ||
| ADCS_power_select_enum_t | cube_sense2, | ||
| ADCS_power_select_enum_t | cube_star_power, | ||
| ADCS_power_select_enum_t | cube_wheel1_power, | ||
| ADCS_power_select_enum_t | cube_wheel2_power, | ||
| ADCS_power_select_enum_t | cube_wheel3_power, | ||
| ADCS_power_select_enum_t | motor_power, | ||
| ADCS_power_select_enum_t | gps_power ) |
Set the power control mode of each component of the ADCS; for each, 0 turns the component off, 1 turns it on, and 2 keeps it the same as previously.
- Parameters
-
cube_control_signal Power control mode for cube control signal cube_control_motor Power control mode for cube control motor cube_sense1 Power control mode for cube sense 1 cube_sense2 Power control mode for cube sense 2 cube_star_power Power control mode for cube star cube_wheel1_power Power control mode for cube wheel 1 cube_wheel2_power Power control mode for cube wheel 2 cube_wheel3_power Power control mode for cube wheel 3 motor_power Power control mode for motor gps_power Power control mode for gps
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_set_rate_gyro_config()
| uint8_t ADCS_set_rate_gyro_config | ( | ADCS_axis_select_enum_t | gyro1, |
| ADCS_axis_select_enum_t | gyro2, | ||
| ADCS_axis_select_enum_t | gyro3, | ||
| double | x_rate_offset, | ||
| double | y_rate_offset, | ||
| double | z_rate_offset, | ||
| uint8_t | rate_sensor_mult ) |
Instruct the ADCS to execute the ADCS_Set_Rate_Gyro_Config command.
- Parameters
-
[in] gyro1 Axis for Gyro #1 (options are pos/neg x, pos/neg y, pos/neg z) [in] gyro2 Axis for Gyro #2 (options are pos/neg x, pos/neg y, pos/neg z) [in] gyro3 Axis for Gyro #3 (options are pos/neg x, pos/neg y, pos/neg z) [in] x_rate_offset x-rate sensor offset [in] y_rate_offset y-rate sensor offset [in] z_rate_offset z-rate sensor offset [in] rate_sensor_mult multiplier of rate sensor measurement
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

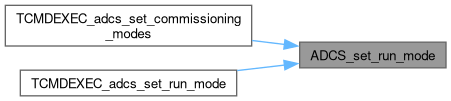
◆ ADCS_set_run_mode()
| uint8_t ADCS_set_run_mode | ( | ADCS_run_mode_enum_t | mode | ) |
Instruct the ADCS to execute the ADCS_Set_Run_Mode command.
- Parameters
-
[in] mode Run mode to set; can be can be off (0), enabled (1), triggered (2), or simulation (3)
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_set_sd_log_config()
| uint8_t ADCS_set_sd_log_config | ( | uint8_t | which_log, |
| const uint8_t ** | log_array, | ||
| uint8_t | log_array_len, | ||
| uint16_t | log_period, | ||
| ADCS_sd_log_destination_enum_t | which_sd ) |
Instruct the ADCS to execute the ADCS_set_sd_log_config command.
- Parameters
-
[in] which_log 1 or 2; which specific log number to log to the SD card [in] log_array Pointer to list of bitmasks to set the log config [in] log_array_len Number of things to log [in] log_period Period to log data to the SD card; if zero, then disable logging [in] which_sd Which SD card to log to; 0 for primary, 1 for secondary
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ ADCS_set_sgp4_orbit_params()
| uint8_t ADCS_set_sgp4_orbit_params | ( | double | inclination, |
| double | eccentricity, | ||
| double | ascending_node_right_ascension, | ||
| double | perigee_argument, | ||
| double | b_star_drag_term, | ||
| double | mean_motion, | ||
| double | mean_anomaly, | ||
| double | epoch ) |
Instruct the ADCS to execute the ADCS_Set_SGP4_Orbit_Params command.
- Parameters
-
[in] inclination inclination (degrees) [in] eccentricity eccentricity (dimensionless) [in] ascending_node_right_ascension right ascension of the ascending node (degrees) [in] perigee_argument argument of perigee (degrees) [in] b_star_drag_term b-star drag term (dimensionless) [in] mean_motion mean motion (orbits per day) [in] mean_anomaly mean anomaly (degrees) [in] epoch epoch (double; integer component is year, decimal component is day)
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_tracking_controller_target_reference()
| uint8_t ADCS_set_tracking_controller_target_reference | ( | float | lon, |
| float | lat, | ||
| float | alt ) |
Instruct the ADCS to execute the ADCS_Set_Tracking_Controller_Target_Reference command.
- Parameters
-
[in] lon longitude [in] lat latitude [in] alt altitude
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_unix_time_save_mode()
| uint8_t ADCS_set_unix_time_save_mode | ( | bool | save_now, |
| bool | save_on_update, | ||
| bool | save_periodic, | ||
| uint8_t | period_s ) |
Instruct the ADCS to execute the ADCS_Set_Unix_Time_Save_Mode command.
- Parameters
-
[in] save_now whether to save the current Unix time immediately (bool passed as int; 1 = save immediately, 0 = don't save immediately) [in] save_on_update whether to save the current Unix time whenever a command is used to update it (bool passed as int; 1 = save on command, 0 = don't) [in] save_periodic whether to save the current Unix time periodically (bool passed as int; 1 = save periodically, 0 = don't) [in] period_s the period of saving the current Unix time
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_set_wheel_speed()
| uint8_t ADCS_set_wheel_speed | ( | int16_t | x_speed, |
| int16_t | y_speed, | ||
| int16_t | z_speed ) |
Instruct the ADCS to execute the titular command.
- Parameters
-
x_speed Wheel speed X value y_speed Wheel speed Y value z_speed Wheel speed Z value
- Returns
- 0 if successful, non-zero if an error occurred in transmission.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ADCS_synchronize_unix_time()
| uint8_t ADCS_synchronize_unix_time | ( | ) |
Instruct the ADCS to synchronize its Unix epoch time to the current OBC Unix time.
- Returns
- 0 if successful, non-zero if a HAL or ADCS error occurred in transmission.
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ adcs_download_buffer
| uint8_t adcs_download_buffer[20480] |
Generated by