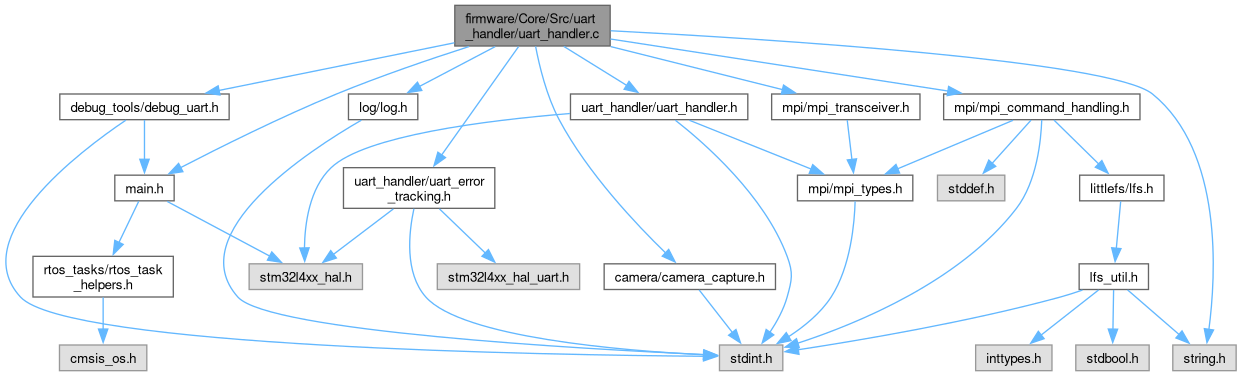
#include "uart_handler/uart_handler.h"#include "debug_tools/debug_uart.h"#include "mpi/mpi_command_handling.h"#include "gnss_receiver/gnss_firehose_storage.h"#include "uart_handler/uart_error_tracking.h"#include "camera/camera_capture.h"#include "log/log.h"#include "timekeeping/timekeeping.h"#include "mpi/mpi_transceiver.h"#include "main.h"#include <string.h>
Include dependency graph for uart_handler.c:
Macros | |
| #define | KISS_FEND 0xC0 |
| #define | KISS_FESC 0xDB |
| #define | KISS_TFEND 0xDC |
| #define | KISS_TFESC 0xDD |
Functions | |
| static uint8_t | kiss_queue_is_full (void) |
| static void | kiss_enqueue_frame (const volatile uint8_t *data, uint16_t len) |
| void | HAL_UART_RxCpltCallback (UART_HandleTypeDef *huart) |
| void | HAL_UART_RxHalfCpltCallback (UART_HandleTypeDef *huart) |
| void | GNSS_set_uart_interrupt_state (uint8_t new_enabled) |
| Sets the UART interrupt state (enabled/disabled). | |
| uint8_t | CAMERA_set_expecting_data (uint8_t new_enabled) |
| Sets the UART interrupt state (enabled/disabled). | |
| void | HAL_UART_ErrorCallback (UART_HandleTypeDef *huart) |
| void | UART_init_uart_handlers (void) |
| Enable the UART interrupts for always-enabled systems. | |
Macro Definition Documentation
◆ KISS_FEND
| #define KISS_FEND 0xC0 |
◆ KISS_FESC
| #define KISS_FESC 0xDB |
◆ KISS_TFEND
| #define KISS_TFEND 0xDC |
◆ KISS_TFESC
| #define KISS_TFESC 0xDD |
Function Documentation
◆ CAMERA_set_expecting_data()
| uint8_t CAMERA_set_expecting_data | ( | uint8_t | new_enabled | ) |
Sets the UART interrupt state (enabled/disabled).
- Parameters
-
new_enabled 1: command sent, expecting data; 0: not expecting data
Here is the caller graph for this function:

◆ GNSS_set_uart_interrupt_state()
| void GNSS_set_uart_interrupt_state | ( | uint8_t | new_enabled | ) |
Sets the UART interrupt state (enabled/disabled).
- Parameters
-
new_enabled 1: enable interrupt; 0: disable interrupt
- Note
- This function must be called very carefully. This type of GNSS is known to, in the wrong mode, spam null bytes, which can lock up the entire system. Thus, the interrupt is disabled by default, and must be enabled explicitly by the GNSS telecommands.
- Function is idempotent. Calling it when already in the desired state is a no-op.
Here is the caller graph for this function:

◆ HAL_UART_ErrorCallback()
| void HAL_UART_ErrorCallback | ( | UART_HandleTypeDef * | huart | ) |
Here is the call graph for this function:

◆ HAL_UART_RxCpltCallback()
| void HAL_UART_RxCpltCallback | ( | UART_HandleTypeDef * | huart | ) |
Here is the call graph for this function:

◆ HAL_UART_RxHalfCpltCallback()
| void HAL_UART_RxHalfCpltCallback | ( | UART_HandleTypeDef * | huart | ) |
Here is the call graph for this function:

◆ kiss_enqueue_frame()
|
inlinestatic |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ kiss_queue_is_full()
|
inlinestatic |
Here is the caller graph for this function:

◆ UART_init_uart_handlers()
| void UART_init_uart_handlers | ( | void | ) |
Enable the UART interrupts for always-enabled systems.
- Note
- Should be called very early in system init. Called in main.c.
Here is the caller graph for this function:

Variable Documentation
◆ CAMERA_uart_half_1_state
| volatile CAMERA_uart_write_state_enum_t CAMERA_uart_half_1_state = CAMERA_UART_WRITE_STATE_IDLE |
◆ CAMERA_uart_half_2_state
| volatile CAMERA_uart_write_state_enum_t CAMERA_uart_half_2_state = CAMERA_UART_WRITE_STATE_IDLE |
◆ kiss_decode_buf
|
static |
Temporary buffer to hold the decoded contents of the current KISS frame. Reset when a frame is completed or an error occurs (e.g. overflow or bad escape).
◆ kiss_decode_len
|
static |
Current write index into kiss_decode_buf, tracking how many decoded bytes have been accumulated in the current frame.
◆ kiss_escaped
|
static |
Indicates whether the previous byte was KISS_FESC, meaning the next byte should be interpreted as an escaped control character (TFEND or TFESC).
◆ kiss_in_frame
|
static |
Indicates whether we are currently inside a KISS frame. Set to 1 after receiving KISS_FEND, and reset on frame completion or error.
◆ MPI_buffer_one_last_filled_uptime_ms
| volatile uint32_t MPI_buffer_one_last_filled_uptime_ms = 0 |
◆ MPI_buffer_one_state
| volatile MPI_buffer_state_enum_t MPI_buffer_one_state = MPI_MEMORY_WRITE_STATUS_READY_TO_FILL |
Current state of the MPI_active_data_median_buffer (pending write vs. written).
◆ MPI_buffer_two_last_filled_uptime_ms
| volatile uint32_t MPI_buffer_two_last_filled_uptime_ms = 0 |
◆ MPI_buffer_two_state
| volatile MPI_buffer_state_enum_t MPI_buffer_two_state = MPI_MEMORY_WRITE_STATUS_READY_TO_FILL |
◆ MPI_science_buffer_len
| const uint16_t MPI_science_buffer_len = 20480 |
Length of the MPI_science_buffer_one and MPI_science_buffer_two arrays.
◆ MPI_science_buffer_one
| volatile uint8_t MPI_science_buffer_one[20480] |
◆ MPI_science_buffer_two
| volatile uint8_t MPI_science_buffer_two[20480] |
◆ UART_ax100_buffer_last_rx_byte
| volatile uint8_t UART_ax100_buffer_last_rx_byte = 0 |
◆ UART_ax100_buffer_write_idx
| volatile uint16_t UART_ax100_buffer_write_idx = 0 |
◆ UART_AX100_kiss_frame_queue
| volatile AX100_kiss_frame_struct_t UART_AX100_kiss_frame_queue[AX100_MAX_KISS_FRAMES_IN_RX_QUEUE] |
◆ UART_AX100_kiss_frame_queue_head
| volatile uint8_t UART_AX100_kiss_frame_queue_head = 0 |
◆ UART_AX100_kiss_frame_queue_tail
| volatile uint8_t UART_AX100_kiss_frame_queue_tail = 0 |
◆ UART_ax100_last_write_time_ms
| volatile uint32_t UART_ax100_last_write_time_ms = 0 |
◆ UART_ax100_port_handle
| UART_HandleTypeDef* UART_ax100_port_handle = &huart2 |
◆ UART_camera_dma_buffer
| volatile uint8_t UART_camera_dma_buffer[CAM_BYTES_TO_RECEIVE_PER_HALF_CALLBACK *2] |
◆ UART_camera_dma_buffer_len
| const uint16_t UART_camera_dma_buffer_len = CAM_BYTES_TO_RECEIVE_PER_HALF_CALLBACK*2 |
◆ UART_camera_dma_buffer_len_half
| const uint16_t UART_camera_dma_buffer_len_half = CAM_BYTES_TO_RECEIVE_PER_HALF_CALLBACK |
◆ UART_camera_last_write_time_ms
| volatile uint32_t UART_camera_last_write_time_ms = 0 |
◆ UART_camera_pending_fs_write_half_1_buf
| volatile uint8_t UART_camera_pending_fs_write_half_1_buf[CAM_BYTES_TO_RECEIVE_PER_HALF_CALLBACK] |
◆ UART_camera_pending_fs_write_half_2_buf
| volatile uint8_t UART_camera_pending_fs_write_half_2_buf[CAM_BYTES_TO_RECEIVE_PER_HALF_CALLBACK] |
◆ UART_camera_port_handle
| UART_HandleTypeDef* UART_camera_port_handle = &huart4 |
◆ UART_eps_buffer
| volatile uint8_t UART_eps_buffer[310] |
◆ UART_eps_buffer_last_rx_byte
| volatile uint8_t UART_eps_buffer_last_rx_byte = 0 |
◆ UART_eps_buffer_len
| const uint16_t UART_eps_buffer_len = 310 |
◆ UART_eps_buffer_write_idx
| volatile uint16_t UART_eps_buffer_write_idx = 0 |
◆ UART_eps_is_expecting_data
| volatile uint8_t UART_eps_is_expecting_data = 0 |
◆ UART_eps_last_write_time_ms
| volatile uint32_t UART_eps_last_write_time_ms = 0 |
◆ UART_eps_port_handle
| UART_HandleTypeDef* UART_eps_port_handle = &huart5 |
◆ UART_gnss_buffer
| volatile uint8_t UART_gnss_buffer[2048] |
◆ UART_gnss_buffer_last_rx_byte
| volatile uint8_t UART_gnss_buffer_last_rx_byte = 0 |
◆ UART_gnss_buffer_len
| const uint16_t UART_gnss_buffer_len = 2048 |
◆ UART_gnss_buffer_write_idx
| volatile uint16_t UART_gnss_buffer_write_idx = 0 |
◆ UART_gnss_last_write_time_ms
| volatile uint32_t UART_gnss_last_write_time_ms = 0 |
◆ UART_gnss_port_handle
| UART_HandleTypeDef* UART_gnss_port_handle = &huart3 |
◆ UART_gnss_uart_interrupt_enabled
| volatile uint8_t UART_gnss_uart_interrupt_enabled = 0 |
◆ UART_mpi_buffer
| volatile uint8_t UART_mpi_buffer[256] |
◆ UART_mpi_buffer_len
| const uint16_t UART_mpi_buffer_len = 256 |
◆ UART_mpi_buffer_write_idx
| volatile uint16_t UART_mpi_buffer_write_idx = 0 |
◆ UART_mpi_last_rx_byte
| volatile uint8_t UART_mpi_last_rx_byte = 0 |
◆ UART_mpi_last_write_time_ms
| volatile uint32_t UART_mpi_last_write_time_ms = 0 |
◆ UART_mpi_port_handle
| UART_HandleTypeDef* UART_mpi_port_handle = &huart1 |
◆ UART_mpi_rx_dma_buffer
| volatile uint8_t UART_mpi_rx_dma_buffer[160] |
◆ UART_mpi_rx_dma_buffer_len
| const uint8_t UART_mpi_rx_dma_buffer_len = 160 |
◆ UART_MPI_science_buffer_index
| volatile uint16_t UART_MPI_science_buffer_index = 0 |
Index into a virtual array that is MPI_science_buffer_one and MPI_science_buffer_two concatenated.
◆ UART_telecommand_buffer
| volatile uint8_t UART_telecommand_buffer[256] |
◆ UART_telecommand_buffer_last_rx_byte
| volatile uint8_t UART_telecommand_buffer_last_rx_byte = 0 |
◆ UART_telecommand_buffer_len
| const uint16_t UART_telecommand_buffer_len = 256 |
◆ UART_telecommand_buffer_write_idx
| volatile uint16_t UART_telecommand_buffer_write_idx = 0 |
◆ UART_telecommand_last_write_time_ms
| volatile uint32_t UART_telecommand_last_write_time_ms = 0 |
◆ UART_telecommand_port_handle
| UART_HandleTypeDef* UART_telecommand_port_handle = &hlpuart1 |
Generated by